如何降低 PFC 的 THD

總諧波失真 (THD) 是信號中存在的諧波失真,定義為一組較高諧波頻率的均方根 (RMS) 振幅與一次諧波或基頻的 RMS 振幅之比。公式 1 將 THD 表示為:
本文引用地址:http://www.j9360.com/article/202409/463111.htm
其中 Vn 是 n 次諧波的 RMS 值,V1 是基波分量的 RMS 值。
在電力系統中,這些諧波會導致從電話傳輸干擾到導體性能下降等各種問題;因此,控制總 THD 非常重要。THD 越低,電機中的峰值電流越低、發熱越少、電磁輻射越低、磁芯損耗越小。
降低 THD 需要功率因數校正 (PFC),這是輸入功率大于 75W 的交流 / 直流電源所必需的。PFC 會強制輸入電流跟隨輸入電壓,以便電子負載生成包含超小諧波的正弦電流波形。
THD 要求越來越嚴格,在服務器應用中尤其如此。模塊化硬件系統通用冗余電源 (M-CRPS) 規范在整個負載范圍內定義了非常嚴格的 THD 要求,如表 1 所示。這比之前的 CRPS THD 規范更為嚴格。

表 1. M-CRPS THD 規范
在傳統的環路調優可能無法滿足要求的 PFC 設計中,滿足此類嚴格的 THD 規范是一項巨大的挑戰。本文將提供幾種方法來幫助降低 THD。
確保檢測到的信號干凈
PFC 控制器可檢測交流輸入電壓、電感器電流和 PFC 輸出電壓。這些檢測到的信號必須干凈,否則會影響 THD。例如,由于交流輸入電壓信號生成正弦電流基準,因此檢測到的信號上的任何尖峰都會導致電流基準失真并影響 THD。
盡管輸出電壓 (VOUT) 信號不用于生成電流基準,但它也可能會影響 THD,因為 VOUT 上的尖峰會在電壓環路輸出上產生紋波,這會影響電流環路基準并最終影響 THD。如果尖峰的幅度足夠大,則可能會觸發電壓環路非線性增益,從而顯著提高 THD。
一種常見的做法是將去耦電容器放置在靠近控制器檢測引腳的位置。您必須仔細選擇電容,以便有效降低噪聲,但不引起過多延遲。使用一個數字無限脈沖響應濾波器來處理檢測到的 VOUT 信號可進一步減少噪聲;由于 PFC 電壓環路比較慢,由該數字濾波器導致的額外延遲是可以接受的。
不過,對于交流電壓檢測,不建議添加數字濾波器,因為它會導致電流基準出現延遲。在這種情況下,您可以使用固件鎖相環 (PLL) 來生成與交流電壓同相的內部正弦波信號,然后使用生成的正弦波信號來調制電流基準。由于 PLL 生成的正弦波是干凈的,即使檢測到的交流電壓上有一些噪聲,電流環路基準也是干凈的。
降低交流過零點處的電流尖峰
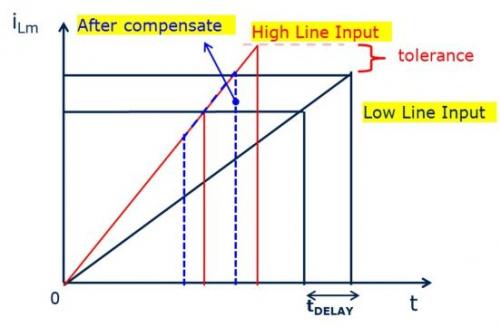
交流過零點處的電流尖峰是圖騰柱無橋 PFC 的固有問題。這些尖峰可能會非常大,以至于無法符合 M-CRPS THD 規范要求。通過分析這些尖峰的根本原因,發現脈寬調制 (PWM) 軟啟動算法(如圖 1 所示)可有效地減少尖峰。

圖 1. 交流過零點處的柵極信號時序
在此解決方案中,當 VAC 在交流過零點后從負周期變為正周期時,有源開關 Q4 首先以非常小的脈沖寬度導通,然后逐漸增加到由控制環路生成的占空比 (D)。Q4 上的軟啟動會逐漸將開關節點漏源電壓 (VDS) 放電至零。一旦 Q4 的軟啟動完成,同步晶體管 Q3 開始導通。它從很小的脈沖寬度開始,然后逐漸增加,直到脈沖寬度達到 1-D。當 Q4 的軟啟動完成且 Q3 的軟啟動開始時,低頻開關 Q2 導通。
過零檢測可能會被噪聲錯誤地觸發。出于安全考慮,在半個交流周期結束時,關斷所有開關。這樣會形成一個較小的死區,從而防止輸入交流短路。從交流正周期到負周期的轉換是相同的。圖 2 展示了測試結果。

圖 2. 不使用和使用 PWM 軟啟動功能時的電流波形:傳統控制方法 (a) 和 PWM 軟啟動 (b)
降低電壓環路影響
電壓環路輸出上的雙倍工頻紋波會影響電流基準,從而影響 THD。為盡可能減少這種頻率紋波的影響,同時又不影響負載瞬態響應,您可以在 VOUT 檢測信號和電壓環路之間添加一個數字陷波(帶阻)濾波器。該陷波濾波器可以有效地衰減雙倍工頻紋波,同時仍能傳遞所有其他頻率信號,包括負載瞬態導致的 VOUT 突變。負載瞬態不會受到影響。
另一種方法是在交流過零實例處檢測 VOUT。由于交流過零實例 Vout_zc(t) 處的 VOUT 的值等于其平均值,并且在穩態下是一個“常量”,因此它是用于電壓環路控制的理想反饋信號。若要處理負載瞬態,請使用以下電壓環路控制律:
If ((Vref – Vout(t) < Threshold)
{
Error = Vref – Vout_zc(t);
VoltageLoop_output = Gv(Error, Kp, Ki);
}
Else
{
Error = Vref – Vout(t);
VoltageLoop_output = Gv(Error, Kp_nl, Ki_nl);
}
如果瞬時 VOUT 誤差很小,請使用交流過零實例 Vout_zc (t) 處的 VOUT 值和小比例積分 (PI) 環路增益 Kp、Ki 計算電壓環路補償器 Gv。當發生導致瞬時 VOUT 誤差大于閾值的負載瞬態時,為 Gv 使用瞬時 Vout(t) 值和 PI 環路增益 Kp_nl、Ki_nl 可將 VOUT 迅速恢復至其標稱值
過采樣
PFC 電感器電流是在每個開關周期中具有直流偏移的鋸齒波;該電流隨后進入運算放大器等信號調節電路,使信號適合 PFC 控制電路。不過,該信號調節電路無法充分衰減輸入電流紋波。電流紋波仍出現在放大器的輸出端。如果該信號在每個開關周期內僅采樣一次,則不存在該信號始終代表平均電流的理想固定位置。因此,使用單個樣本時,很難實現良好的 THD。
為了獲得更準確的反饋信號,建議使用過采樣機制。圖 3 展示了可在每個開關周期內對電流反饋信號進行八次平均采樣,對結果求平均值,然后將其發送至控制環路。過采樣有效地計算電流紋波平均值,以便測量的電流信號更接近平均電流值。此外,控制器對噪聲(包括信號噪聲和測量噪聲)的敏感度會降低。過采樣是減少電流波形失真的有效方法之一。

圖 3. 在每個開關周期中進行八次過采樣
占空比前饋
占空比前饋控制的基本原理是預先計算占空比,然后將此占空比添加到反饋控制器中。對于在連續導通模式下運行的升壓拓撲,公式 2 可用于計算占空比 (dFF):

該占空比形式可在開關上有效地生成一個電壓,此電壓在一個開關周期內的平均值等于整流輸入電壓。常規電流環路補償器會根據計算出的該占空比來更改占空比。
圖 4 展示了得到的控制方案。使用公式 2 計算 dFF 后,將其與傳統的平均電流模式控制輸出 (dI) 相加。然后,可以使用最終得到的占空比 (d) 生成 PWM 波形以控制 PFC。

圖 4. 平均電流模式控制和 dFF
鑒于占空比的大部分是由占空比前饋生成的,控制環路僅對計算出的占空比進行略微調整。這項技術可以幫助改善控制器環路帶寬受限型應用中的 THD。
交流周期跳躍
通常,滿足輕負載 THD 要求比滿足重負載 THD 要求更困難,特別是要滿足 M-CRPS 規范中的 5% 負載 THD 要求時。如果 PFC 滿足除 5% 負載時以外的所有其他 THD 要求,那么即使您已嘗試到目前為止提到的所有方法,交流周期跳躍方法也會有所幫助。
將交流周期跳躍想象成一個特殊的突發模式:當負載小于預定義閾值時,PFC 進入此模式,并根據負載跳過一個或多個交流周期。換句話說,PFC 在一個或多個交流周期內關斷,然后在下一個交流周期重新導通。導通和關斷發生在交流過零點處,以便跳過整個交流周期。由于 PFC 在電流為零時導通和關斷,因此應力和電磁干擾較小。交流周期跳躍與傳統的 PWM 脈沖跳躍突發模式(隨機跳過 PWM 脈沖)不同。
要跳過的交流周期數與負載成反比;負載越小,跳過的交流周期就越多。圖 5 展示了跳過一個交流周期。通道 1是交流電壓,通道 4 是交流電流。

圖 5. 輕負載下的交流周期跳躍
當 PFC 由于電流為零而關斷時,THD 為零。由于 PFC 需要補償關斷周期,因此它在導通時會提供大于平均值的大功率。實際上,這會在中等負載下運行 PFC,或者將其完全關斷。鑒于中等負載時的 THD 遠低于輕負載時的 THD,輕負載 THD 有所降低。
測試結果
我們在通過德州儀器 (TI) C2000? 微控制器控制的 3kW 圖騰柱無橋 PFC [5] 上實施了本文所述的方法。圖 6 展示了 240VAC 時的 THD 測試結果。

圖 6. THD 測試結果
THD 不僅符合最新的 M-CRPS THD 規范,而且還具有足夠的裕量,可確保 PFC 即使在具有硬件容差的情況下也能在大規模生產期間滿足規范要求。



評論