一種基于RBF神經網絡的卷接機振動狀態監測系統
 加入技術交流群
加入技術交流群

掃碼加入
和技術大咖面對面交流
海量資料庫查詢
摘 要:本文首先介紹了基于徑向基函數(radial basis function, RBF)神經網絡的卷接機振動狀態監測系統的總體方案設計;然后對硬件設計方案進行了說明;接著詳細描述了系統的軟件設計部分,包括數據交互處理、時域特征識別、FFT分析過程和特征提取等模塊。最后,對卷接機振動狀態監測系統的研制成果進行總結。
本文引用地址:http://www.j9360.com/article/202209/438520.htm1 引言
卷接機是卷煙生產過程中的一個重要設備,其功能是將煙絲卷制成煙支。隨著卷接設備的高速發展,卷接設備的結構日趨復雜、精密,為了實現高效生產,提高卷煙速度,僅憑技術和經驗,效果畢竟有限,難以推動生產效率真正躍上新臺階。主要原因在于,機械損耗和意外故障等難以預料的因素導致卷接機無法正常運轉而引起的緊急關停,嚴重影響了卷接機的運轉率。為了進一步減少卷接機故障停機時間,提高設備有效作業率,本文提出了一種基于 RBF 神經網絡的卷接機振動狀態監測系統。
在故障設備診斷中,故障特征與故障模式并不是簡單的一一對應關系,其構成的特征空間比較復雜,常常線性不可分。而 RBF 神經網絡能夠映射這種任意復雜的非線性關系,本文提取振動信號的時、頻域特征,輸入 RBF 神經網絡進行特征識別和分類,進而對振動狀態進行監測。
2 系統總體方案設計
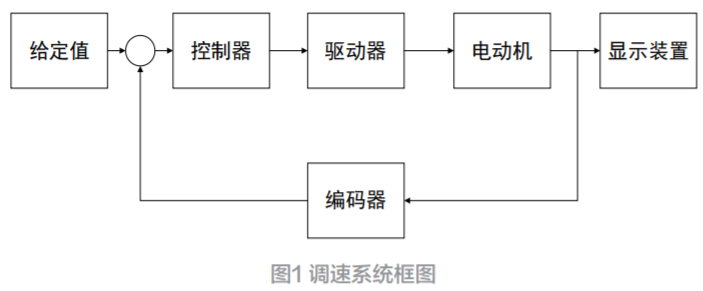
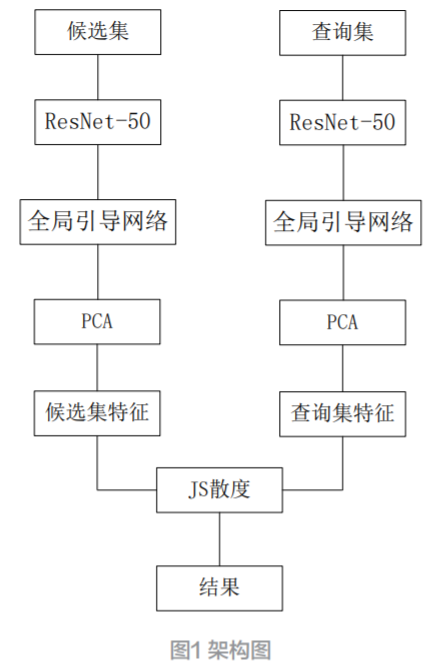
卷接機振動狀態監測系統總體方案如圖 1 所示,包括傳感采集模塊、振動信號監測模塊、人機交互模塊。
傳感采集模塊選用頻率響應范圍 10 kHz 的振動傳感器以滿足系統對振動頻率的要求,考慮到卷接機組空間范圍的限制,振動傳感器采用磁吸方式吸附。
振動信號監測模塊選用倍福 C6000 系列處理器作為控制單元,采用多任務并行處理方式,首先對振動信號進行滑動平均濾波;然后測量振動信號的時域特征 RMS,和頻率特征 FFT;最后提取特征向量,輸入 RBF 神經網絡,完成振動故障預判。
人機交互模塊,采用 C# 編程語言,完成角色管理、權限分配、日志管理、數據存儲、故障報警和參數設置等功能。

3 硬件設計
采用工業式 PC 模塊,超采樣模擬量輸入端子模塊,帶 IEPE 接口的加速度傳感器模塊和工控機組成。超采樣模擬量輸入端子模塊首先完成配置濾波器和供電電流的調整,然后以 10 倍的采樣倍數完成振動數據的采集。采集的振動數據輸入工業式 PC 模塊。工業式 PC 模塊對采集的振動數據進行濾波,并完成振動特征數據的計算與存儲。然后通過 ADS 通信協議與工控 機進行數據通信。工控機完成 RBF 神經網絡的訓練和數據的測試,實現故障診斷和界面顯示功能。振動狀態監測的硬件連接 圖如圖 2 所示。

4 軟件設計
4.1 數據交互
本系統的數據處理主要分布在工業式 PC 和工控機兩端,具體過程如圖 3 所示。需經過以下步驟。

1.工業式 PC 端
(1) 濾波器和供電電流配置;
(2) 參數初始化;
(3) 以 10 KHz 速率完成振動信號采樣
(4) 數據濾波;
(5) 填充輸入緩沖區;
(6) 進行 FFT 變換和 RMS 值計算;
(7) 數據輸出與存儲。
2. 工控機端
(1) 從 cvs 文件讀取保存的頻譜值,頻譜值分為 7 個頻段;
(2) 初始化神經網絡內存;
(3) 申請樣點誤差內存;
(4) 初始化網絡參數;
(5) 計算個體誤差和總體誤差;
(6) 如果未達到訓練次數且樣點誤差小于閾值,循環計算網絡輸出和樣點輸出的誤差,直到條件不成立 , 輸出中心向量、基寬、輸出權重;
(7) 數據測試、輸出結果。
4.2 時域特征識別
機械振動的瞬時值隨著時間而不斷地變化 , 作為表示這種 振動變化大小的方法 , 廣泛地使用有效值。利用時域參數 RMS 值(有效值)進行簡易診斷 , 即判斷電機是否有故障。振動信號的時域特征有效值 (RMS) 是振動振幅的均方根值,定義如下:

電機正常時 RMS 波形如圖 4 所示,RMS 值約為 105;電機故障時 RMS 波形如圖 5 所示,RMS 值約為 237,RMS 值有明顯變化。


4.3 FFT分析過程


電機的振動頻率成分十分豐富 , 每一種特定的故障都對應特定的頻率成分。電機正常運行時 FFT 波形如圖 7 所示,波峰處于 550 Hz, 幅度為 0.95。電機故障時波形如圖 8 所示,此時波峰處于 180 Hz, 幅度為 2.0。無故障情況下 , 峰值很小,說明運轉平穩,當電機出現故障時,會出現沖擊,波峰會明顯加大,甚至是成倍增加。頻譜分析法可確定電機振動信號的頻率構成,振動能量在各頻率成分上的分布。


4.4 特征提取
振動特征數據與故障模式并非簡單的線性關系,所構成的故障特征空間比較復雜,而 RBF 神經網絡能夠轉換這種復雜的非線性映射,具有最佳逼近性能和全局最有解。所以采用 RBF 神經網絡代替人工對振動故障特性進行診斷是實際可行的。
在RBF神經網絡信息傳遞過程中,第一層為輸入層,輸入層節點主要負責接收來自外界的數據信息,將輸入數據傳遞到隱含層;第二層為隱含層,隱含層激活函數通常選取高斯函數,主要是對輸入數據進行變換,將低維的模式輸入變換到高維空間內;第三層為輸出層,輸出層是對隱含層采用線性加權求和得到網絡輸出,這樣使得網絡的收斂速度很快。
假設 RBF 神經網絡的結構大小為:M-H-1,其各層輸入輸出關系描述如下。
(1) 輸入層輸入層共有 M 個神經元,RBF 網絡的輸入向量表達式如下:



卷接機組的振動信號在頻域內的能量分布具有比較明顯的特點,因此,選取 7 段譜特征作為模型的輸入向量。具體

在 RBF 神經網絡工作以前,需要確定一定數量的訓練樣本對 RBF 神經網絡進行訓練,訓練好的 RBF 神 經網絡的數據中心、方差、連接權保持固定。這樣輸入測試樣本就可以獲得結果,當測試樣本的特征與 RBF 神經網絡中對應的某個特征相近時,神經網絡輸出該類故障。本文同時結合振動信號的 RMS 值和 7 段譜特征作為構造特征向量,在故障特征向量空間內進行分類,然后以這些特征向量為學習樣本,輸入 RBF 神經網絡訓練,得出中心向量、基寬、輸出權重,完成結果值預測。
5 結語
本文提出一種基于 RBF 神經網絡的卷接機振動狀態監測系統,基于倍福的多任務并行處理器 C6000,對經過滑動平均濾波處理后的振動信號,有效提取時域特征 RMS 值和 FFT 頻域的 7 段譜特征,以此構造 rbf 神 經網絡的特征向量,進行特征向量空間的分類,完成故障狀態的預測。
參考文獻:
[1] 安茹.基于動態RBF神經網絡的出水氨氮軟測量研究[D].北京:北京工業大學,2017.
[2] 陳松.RBF神經網絡在旋轉機械故障診斷中的應用[D].合肥:安徽建筑大學,2014.
[3] 王建國,孫小明,王少鋒,等.基于LabVIEW的風電機組齒輪箱健康狀態監測系統設計[D].包頭:內蒙古科技大學,2016.
[4] 汪慶華,王敬濤,鄧東花.基于徑向基神經網絡的旋轉機械故障診斷[D].西安:西安工業大學,2010.
[5] 高帆,李洪元,吳帆.基于頻譜分析的離心泵健康狀態監測及故障診斷[R].重慶:重慶川儀軟件有限公司,2019.
(注:本文轉載自《電子產品世界》雜志2022年9月期)




評論