基于Kane方法的工業(yè)機器人系統(tǒng)柔性動力學模型研究*
 加入技術交流群
加入技術交流群

掃碼加入
和技術大咖面對面交流
海量資料庫查詢
*基金項目:工業(yè)和信息化部2020年產(chǎn)業(yè)技術基礎公共服務平臺—工業(yè)機器人核心關鍵技術驗證與支撐保障服務平臺建設項目(2020-0097-1-1)
本文引用地址:http://www.j9360.com/article/202204/432713.htm現(xiàn)有工業(yè)機器人控制領域,已建立基于機器人全剛性連接假設的機器人動力學模型[1][2][3],基于該模型實時引入動力學前饋控制量,可在一定程度上改善系統(tǒng)動態(tài)響應速度,但卻不可避免地導致了系統(tǒng)末端抖動和不穩(wěn)定性[4]。已有研究表明,機器人系統(tǒng)中的柔性因素(關節(jié)柔性)可影響末端執(zhí)行器的定位精度與運行穩(wěn)定性[5],建立考慮機器人柔性因素的動力學模型,對分析確定機器人末端抖動的根源至關重要,同時可為后續(xù)優(yōu)化控制提供基礎[6]。此外,提高機器人柔順性具有廣闊的應用前景,但柔性動力學模型建立及其控制也存在一定挑戰(zhàn)性[7]。
本文首先建立了基于Kane 方法的傳統(tǒng)剛性動力學模型,通過對機器人系統(tǒng)的關節(jié)耦合特性進行研究,分析了該模型缺陷和潛在導致系統(tǒng)不穩(wěn)定及末端抖動原因,針對此問題對剛性動力學模型進行改進;考慮關節(jié)柔性因素提出基于Kane 方法的工業(yè)機器人系統(tǒng)柔性動力學模型,旨在更準確反映機器人機電系統(tǒng)的固有特征,提高前饋控制準確性,從而改善系統(tǒng)控制特性。
1 機電系統(tǒng)動力學模型建模方法
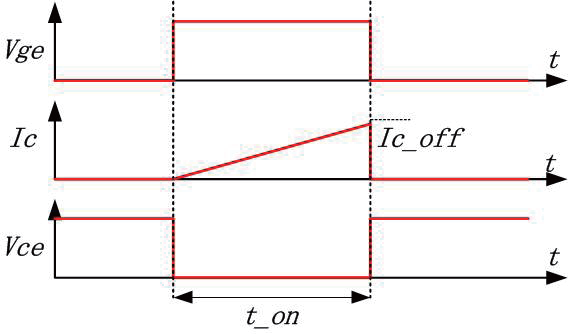
理想情況下,機電系統(tǒng)認為是剛性動力學系統(tǒng),控制如圖1 所示。

圖1 剛性動力學系統(tǒng)(機電系統(tǒng))
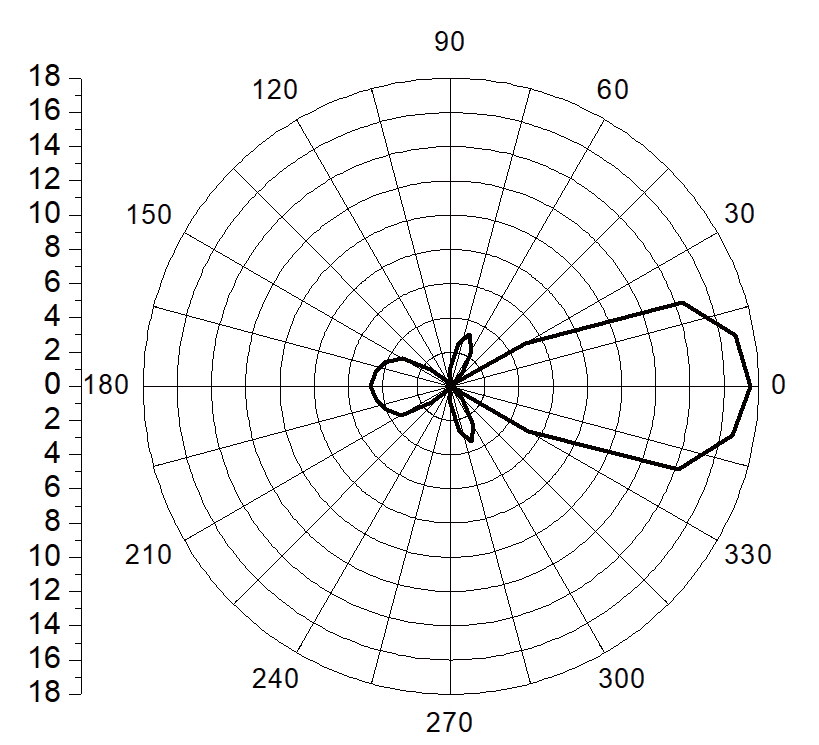
基于剛性動力學模型基礎,根據(jù)圖2 工業(yè)機器人關節(jié)運動狀態(tài),考慮關節(jié)柔性因素,可改進為柔性動力學模型。

動力學建模目前有許多較為成熟的方法可供使用,較為常用的包括:Newton-Euler 方法;Lagrange 方程;Kane 方法。這些方法思路不同,但均可根據(jù)動力學普遍方程相互轉化,在本文采用Kane 方法進行研究,可建立如下形式方程:
MX+CX+KX=F
2 基于Kane方法的剛性系統(tǒng)模型
2.1 剛性系統(tǒng)模型
Kane 方法基于偏速度與偏角速度的概念,即運動過程中某一位置點與廣義坐標的相對關系。剛性系統(tǒng)的動力學模型可基于各個連桿的廣義主動力與廣義慣性力獲取。
在工業(yè)機器人上選取各個關節(jié)轉角的廣義坐標,將各個連桿的角速度與線速度表示在其坐標系中,構建DH 矩陣:

為簡化后續(xù)的分析,在各個連桿上建立固結于連桿的坐標系,并將各個連桿的運動學參數(shù)在局部坐標系中表示。
● 連桿角速度

● 連桿角加速度

● 連桿線速度

● 連桿線加速度
![]()
● 連桿質(zhì)心的速度

在Kane 方法中,需要引入偏速度的概念
● 連桿偏角速度

● 連桿偏速度

在動力學廣義慣性力為連桿旋轉的慣性力,可表示為:

其中,

對每一個自由度應用Kane 方程,可得:

從而可得動力學方程:

對于剛性模型的動力學方程,q 為電機輸出的轉角,因此關于q 的信息已知,通過給定的運動,可以獲知給定狀態(tài)下的電機扭矩。
剛性動力學模型在給定的關節(jié)轉速下,可以確定末端的位置姿態(tài)以及關節(jié)扭矩,可作為動力學前饋控制基礎,用于提升機器人控制的精度和響應。但由于運動中擾動的存在以及動力學建模中不可避免的誤差,實際的機器人控制系統(tǒng)不能完全依賴于動力學模型,而需要進行實時反饋控制。且理想的剛性連接假設前提下,動力學模型忽略了關節(jié)非線性因素,將引發(fā)機器人系統(tǒng)在部分位姿控制中產(chǎn)生諧振及動態(tài)響應遲滯現(xiàn)象,進而導致系統(tǒng)不穩(wěn)定及末端抖動。
2.2 關節(jié)柔性模型
當考慮關節(jié)柔性時,各個連桿的遞推關系為:
● 連桿角速度

● 連桿線速度

● 連桿線加速度
![]()
● 連桿質(zhì)心的速度

當考慮關節(jié)柔性時,各個連桿的偏速度可表示為:
● 連桿偏角速度

● 連桿偏速度

● 連桿質(zhì)心偏速度

與剛性模型相比,利用Kane 方法得到的各個自由度的方程針對于連桿在彈簧變性后的轉角,針對電機輸出的自由度:
● 廣義慣性力

● 廣義主動力

利用Kane 方程可建立考慮關節(jié)柔性系統(tǒng)的動力學模型:

所導出的方程為12 個2 階微分方程,當考慮關節(jié)柔性的影響時,原有的微分方程將轉變?yōu)椋?/p>

此時的微分方程組為時變微分方程,需要進行數(shù)值求解。由該方程的形式可知,該方程為時變非線性微分方程,其系數(shù)矩陣中,質(zhì)量矩陣、阻尼矩陣以及剛度矩陣均為坐標的函數(shù),這使得該方程難以得到解析解,可以使用的Newmark-β 方法,進行求解,具有二階精度。
目前這一探索性研究已應用于工業(yè)機器人機電系統(tǒng)的動力學模型構建,與伺服控制實際應用具有吻合性。這一柔性動力學建模方法在控制領域的意義在于,可將這一方法應用于高速高精度應用場景的機器人軌跡控制,特別是要求低振動的平穩(wěn)軌跡應用,例如切割、涂膠等,這在實際工程中是常見的。
3 結論
本文通過建立了工業(yè)機器人剛性動力學模型,作為動力學前饋控制基礎,用于提升機器人控制的精度和響應,并分析了該模型忽略關節(jié)非線性特性帶來的潛在問題。針對剛性動力學模型潛在問題,考慮關節(jié)柔性因素,推導出關節(jié)柔性動力學模型,此模型更接近機器人真實固有特性,可實現(xiàn)機器人更高精度和更高帶寬的動態(tài)控制,降低末端抖動并提高系統(tǒng)穩(wěn)定性。通過Kane 方法推導建立數(shù)學模型,論證了其可行性,為類似機電系統(tǒng)建模提供指導。
參考文獻:
[1] 浙江大學.一種工業(yè)機器人時間最優(yōu)控制軌跡的優(yōu)化方法:CN202110499901.X[P].2021-08-24.
[2] 江蘇集萃復合材料裝備研究所有限公司.一種基于動力學模型的骨科手術機器人控制方法:CN202110318897.2[P].2021-06-18.
[3] 陳柏,謝本華,丁力,等.一種帶負載工業(yè)機器人動力學模型辨識方法[J]. 南京航空航天大學學報,2016,48(6):835-840.
[4] 陳永剛,樊開夫,譚晶晶,等.工業(yè)六軸機器人末端抖動的研究[J].實驗室研究與探索,2019,38(12):44-47.
[5] 張鐵,張愛民,覃彬彬,等.柔體動力學模型的機器人柔性力矩前饋控制[J].哈爾濱工程大學學報,2019,40(8):1509-1516.
[6] 哈爾濱工業(yè)大學.一種基于動力學的噴涂機器人時間最優(yōu)軌跡規(guī)劃方法:CN202110482412.3[P].2021-07-09.
[7] 康榮杰,劉躍,耿仕能,等.絲驅動連續(xù)型機器人的建模與避障控制[J]. 天津大學學報,2021,54(6):651-660.
(本文來源于《電子產(chǎn)品世界》雜志2022年3月期)



評論