道路運輸大型車輛新型行車安全系統設計

摘要:詳細分析了大型車輛存在的盲區和解決方案功能單一的問題,發現傳統部標機滿足監管需要但交互性體驗感差,駕駛員有一定排斥心理,故意遮擋、破壞衛星定位終端逃避監控的行為,表明部標機整體上線率不高。本文提出一種新型行車安全系統,最多能接8路視頻,集成360全景算法解決車輛視覺盲區問題,支持倒車顯示,并提供錄像、本機回放功能,具備4G全網通系統支持在線地圖,方便導航和查看實時路況,集成滿足監管要求的ADAS和DMS,支持JT/T808和JT/T1078標準協議,實現遠程監管。系統不僅滿足了駕駛員多方面需求,還滿足了交管部門監管要求,集成度高、功能豐富、能完成需要多種設備才能完成的功能,經濟性和實用性俱佳,有助于解決駕駛員和監管機構之間的矛盾,能降低交通事故率。
作者簡介:孫德生(1980—),男,碩士,工程師,目前從事嵌入式系統、智能電子產品、汽車電子電器設計和開發工作。E-mail:89660958@qq.com。
0 引言
隨著我國經濟持續高速增長,大型車輛快速增加,包括大貨車、大巴、公交等。這些車輛都有一些共同特點,如體積大、車身高、轉彎半徑大、內輪差大、駕駛時盲區較多[1-2]。近年來,由于大型車輛盲區問題造成的交通事故越來越多,因此,解決大型車輛盲區問題顯得尤為重要[3]。市面上也有一些單獨解決駕駛盲區的設備,如電子外后視鏡、360 全景,但其功能單一,集成度低,拓展性差。另外,出于監管需要,交通部對道路運輸車輛要求安裝符合JT/T808 和JT/T1078 標準的設備,兩客一危還得支持主動安全ADAS等,結構上趨于單錠機,就是市場上俗稱的部標機。它一般不帶顯示屏,駕駛員無法直接操作設備,缺乏交互體驗感,無法本機回放視頻,很不方便。部標機更偏重于技術監管,駕駛員對部標機有一定排斥心理,故意遮擋、破壞衛星定位終端、逃避監控行為時有發生,導致目前部標機上線率不高,監控人員責任心不強,不能實時提醒糾正駕駛員違法、違規行為,在監管上也存在一定難度[4]。
本文提出基于高通MSM8953 的新型行車安全系統,支持最多8 路視頻接入,導入360 全景算法解決車輛的視覺盲區,配置12.3 英寸(1 英寸=2.54 cm)高清顯示屏,顯示效果清晰,支持倒車顯示,并提供DVR 錄像功能,有緊急情況時本機快速回放錄像,具備4G 全網通的系統可支持在線地圖,方便導航和查看實時路況。支持滿足監管主動安全要求的ADAS 和DMS,以及JT/T808和JT/T1078 標準協議,可輕松實現平臺監管。本系統設計解決了司機的盲區問題,滿足倒車安全、查看實況導航、本地回放多路視頻錄像等需求,又支持JT/T808和JT/T1078 標準協議及主動安全ADAS 和DMS,滿足監管需要。設備集成度高,能完成需要多種設備才能完成的功能,經濟性和實用性好,可以平衡駕駛員和監管之間的矛盾,真正以科技降低交通事故率,利國利民。

1 新型行車安全系統硬件設計
本文提出基于高通8953平臺設計的一套功能豐富、滿足道路運輸大型車輛安全行車的智能系統。
1.1 系統硬件框架設計
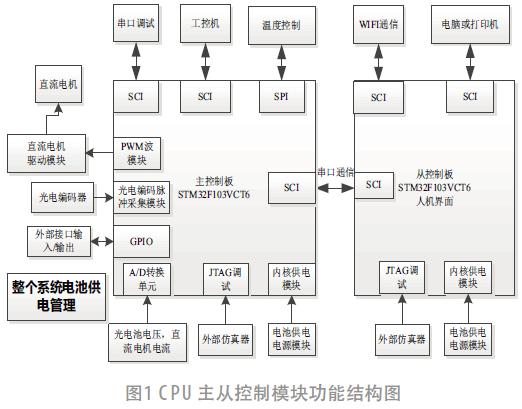
新型智能行車安全系統的硬件原理框圖如圖1所示。
系統主控制器采用高通MSM8953,8 核Cortex-A53,主頻2.0 GHz,14 nm 制程,GPU 為Adreno506,集成4G LTE 基帶支持LTE CAT 7 全網通,可插入SIM 卡聯網。電源模塊采用寬電壓設計,9 ~ 36 V 均能正常工作,適應標準電壓為12 V 或24 V 的車輛。系統工作溫度為-30 ~ 75 ℃,存儲溫度范圍為(-40 ~ 85)℃,搭配的eMCP 為SKhynix 的H9TQ27ADFTMC, 其中存儲為32 GB,運行內存為3 GB LPDDR3,配置12.3英寸1 920×720 分辨率的TFT LCD 顯示屏、12.3 英寸10 通道觸摸屏;內置GNSS 模塊支持北斗、GPS、GLONASS 多種定位系統,內置無線模塊支持802.11 b/g/n/ac 功能。系統支持5 個硬按鍵,可做按鍵開關機、音量大小調節,或定義為其他快捷操作;接入手麥支持PTT 對講與播放功能,可與后臺控制中心實時通話。系統支持接入多路攝像頭,走AHD 信號,最多可接入8路720P 攝像頭,可以解決司機盲區、AI 智能識別等,且支持DVR 錄像,存儲到TF 卡或U 盤。系統預留了兩組串口,一組可以接CAN 模塊獲取原車CAN 信息,另一組可接入雷達主機獲取周邊障礙物感知,拓展了整個系統的功能,提高了復雜場景的實用性。
1.2 多路攝像頭接入設計
系統設計使用高通MSM8953,均能接MIPI 4 LaneCSI0 和CSI1 兩組接口,一路CSI 的最大處理能力為4路720P@30 fps,兩路CSI 共可接入8 路720P 攝像頭。多路攝像頭接入如圖2 所示。

圖2 多路攝像頭接入框圖
CSI MIPI 信號支持虛擬通道,如圖2 所示,連接主控平臺MSM8953 的視頻解碼芯片TP2855 通過CSIMIPI 提供4 Lane 信號。VC0 ~ VC7 代表8 個虛擬通道,每個虛擬通道可以連接1 個攝像頭,通過1 個視頻解碼芯片TP2855 將4 個攝像頭數據按照虛擬通道設計融合在一起,然后通過MIPI 4 Lane 送到主控,在主控MSM8953 中再將融合數據按照虛擬通道拆開,重新還原成4 個攝像頭的獨立數據。整個系統可以接前向ADAS、DMS、車內監控、360 全景攝像頭、其他用途的標準AHD 信號720P 攝像頭,系統同時支持錄像,包括8 路攝像頭同時錄像存儲到TF 卡或U 盤。其強勁的視頻能力對整套系統價值的作用至關重要。
1.3 拓展功能模塊接入設計
系統硬件接口有限,為了拓展一些功能,不得不接入一些其他成熟的功能模塊來豐富系統功能和提高體驗感。以拓展CAN 模塊和雷達主機功能模塊為例,接入設計如圖3 所示。

圖3 功能模塊拓展框圖
系統預留兩組串口,一組可以接CAN 模塊,CAN模塊連接車輛CAN,然后把解析好的CAN 信息通過RS232 串口發送給主控平臺,如實時車速、左轉向、右轉向、倒車、檔位等信息,可用于ADAS 預警和智能切換盲區顯示圖像。系統另一組串口接入一個雷達主機,最多可以支持8 路雷達探頭連接雷達主機。雷達主機實時獲取各路探頭探測的前方障礙物距離信息,通過串口協議送給主控平臺,主控再根據預設探頭安裝位置確定是哪個方位的預警信息。利用雷達探頭的距離信息觸發系統顯示狀態的變化。在處理其他應用場景時,如當前在導航頁面,雷達探測到右側探頭近距離范圍有物體遮擋,系統即可根據探頭的安裝位置,實時調出車輛右側安裝的攝像頭畫面[5],便于駕駛員觀察做出安全合理的操控。

2 新型行車安全系統軟件設計
新型智能行車安全系統軟件基于Android 9.0,針對車載場景做了大量系統裁剪、改造,系統集成了ADAS、DMS、360°全景算法等,最多支持8 路錄像和JT/T808 和JT/T1078 協議,以及江蘇省道路運輸車輛主動安全智能防控系統標準協議(簡稱蘇標),滿足監管要求,可以切實降低交通事故風險。
2.1 前向ADAS
2017 年初,JT/T1094 標準《營運客車安全技術條件》中明確要求,2018 年4 月起,車長超過9 m 的營運客車都需要加裝符合JT/T 883 要求的LDW(車道偏離預警系統)和FCW(前車碰撞預警系統)。ADAS 是高級駕駛輔助系統,包含LDW 和FCW。通過視覺傳感器進行數據采集、分析,利用視覺算法識別行駛過程中的多種危險情況,可提前進行預警,及時提醒駕駛員防范危險情況的發生[6]。ADAS 處理流程框架設計如圖4所示。
高通8953 處理器的圖像數據處理模塊通過硬件抽象層獲取前視攝像頭圖像的原始數據,然后將每一幀數據送給ADAS 算法預警處理模塊,通過預警處理模塊將識別前方車道線、車輛、行人等物體的類型、坐標等信息反饋回去,再把識別出來的信息傳遞給系統識別結果處理模塊,根據信息采取合適的預警邏輯處理,根據預警級別選擇TTS 語音模塊處理,語音提醒駕駛員注意前方狀況[7]。根據蘇標主動安全監管要求,需要在觸發預警事件時拍攝時間間隔為200 ms 的3 張照片和1 段默認為5 s 長的短視頻上傳到監管平臺[8],如圖5 所示。

圖5 平臺顯示主動安全ADAS事件
2.2 DMS
DMS 是駕駛員行為分析,通過終端采用人臉識別、深度學習技術分析駕駛員是否有抽煙、打瞌睡、接電話、分神、疲勞駕駛、駕駛行為異常等違規行為,規范駕駛員行為,提高駕駛安全性[6,9]。DMS 算法處理的工作流程與ADAS 類似,觸發了DMS 預警事件時,按照蘇標要求也需要拍3 張間隔為200 ms 的照片和1 段默認為5 s 長的短視頻上傳到監管平臺保留證據,DMS 事件在平臺上的顯示如圖6 所示。

圖6 平臺顯示主動安全DMS事件
2.3 360°全景
360°全景一直是解決駕駛員視覺盲區最有效的方法之一。系統集成了北京雙髻鯊免拼接360 全景算法,功能先進,特別適用于大型車輛,安裝時無需傳統的鋪布標定,非常便利。360°算法應用流程框圖如圖7 所示。

通過安裝在車身前后左右的4 個高清廣角攝像頭,能實時采集車身左右各6 m、前后各5 m 超大視野的高清視頻畫面。4 路圖像幀數據均輸入到360 算法引擎中,通過精確算法進行畫面畸變校正、圖像拼接融合等處理[10],標定時需要在光線充足的白天進行,車輛要在比較平整且紋理較多的道路上低速行駛,速度不超過5 km/h,以便于算法計算參考標志,總過程不超過5 min 就可快速合成車身周圍360°俯視鳥瞰全景畫面。圖像預覽基于OpenGl 以3D 處理,3D 立體效果好,可以有效降低盲區帶來的事故。安裝在深圳公交上的360全景實測效果如圖8 所示。

圖8 公交車360全景實測效果
駕駛員可自行滑動右側3D 顯示角度到所需觀察角度。結合CAN 信息,系統在收到左/ 右轉向信號后,可以自動切換到左/ 右攝像頭畫面,收到倒車信號可以切換到后視攝像頭畫面,切換到右側的實測效果如圖9所示。

圖9 360°全景顯示俯視圖和右側放大圖
2.4 遠程監控
交管對大型車輛的監管嚴格,如兩客一危車輛必須安裝部標機和支持ADAS,每年還需要年審。部標機實時上報位置到監管平臺,按照JT/T808 協議標準處理。本系統在設計中不但充分考慮了位置信息的需求,而且結合4G 全網通的優勢,按照JT/T1078 視頻傳輸要求,可以實時將車輛的多路攝像頭畫面送到監控平臺。車隊領導等監管領導在平臺上可輕松獲取當前車輛位置,通過攝像頭視頻查看車輛周圍環境[11],通過DMS 攝像頭還可以直接看到駕駛員的實際駕駛狀態,有異常時可及時糾正,規范駕駛員行為。
系統運行時還可以定時發送車輛位置到平臺,如3 s 發送一次,平臺按車輛車牌分類存儲,進而形成行車軌跡,直觀地在平臺上查看車輛具體的行駛路線,以及當時行駛的車速、方向等。
系統還支持語音對講,管理人員在平臺上可以監聽車內聲音,也可直接呼叫駕駛員,駕駛員通過手麥可以回話,手麥外放聲音大,在嘈雜的柴油車上也能聽得清楚,溝通時非常實用方便。
3 結束語
本系統設計不僅解決了司機的盲區需求和駕駛輔助問題,又支持JT/T808 和JT/T1078 標準協議以及主動安全ADAS 和DMS,能滿足監管要求,調和司機和監管之間的矛盾,最大幅降低交通事故率,使多方受益。
參考文獻:
[1] 陳家豪.論大貨車盲區監測的可行性和必要性[J].汽車工程學報,2018,8(5):92-97.
[2] 趙志成,張玉峰,何佳,等.車輛盲區監測系統綜述[J].汽車電器,2018(10):20-22.
[3] 尹興林,徐鑫.城市公交行車安全事故分析研究[J].城市公共交通,2019(07):26-28+30.
[4] 李梅.廣西道路運輸安全事故統計分析及對策建議[J]. 西部交通科技,2020(5):166-170.
[5] 陳立偉,仝盼盼,熊敏,等.24GHz盲區監測與變道輔助雷達系統的開發[J].汽車安全與節能學報,2019,10(2):200-210.
[6] 康瑩瑩.保障公交車安全的主動安全智能防控系統[J]. 城市公共交通,2019(11):38+41.
[7] 孫德生.基于ADAS的汽車倒車防碰撞系統設計與研究[J].電子技術應用,2021,47(1):28-30,35.
[8] 江蘇省交通運輸廳運輸管理局.2017.道路運輸車輛主動安全智能防控系統[S].
[9] 上海市交通運輸行業協會新能源和節能減排分會. 基于視覺技術的公交主動安全預警應用現狀及發展趨勢[J].城市公共交通,2020(08):42-45+49.
[10] 許翔,黃宏宏.一種基于全景影像技術的車輛盲區監測系統:中國,CN110920525A [P].2020-03-27.
[11] JT/T 1078—2016.道路運輸車輛衛星定位系統視頻通訊協議[S].北京:交通運輸部,2016.
(本文來源于《電子產品世界》雜志2021年6月期)




評論