圖文解析基于DSP逆變電源的控制方式

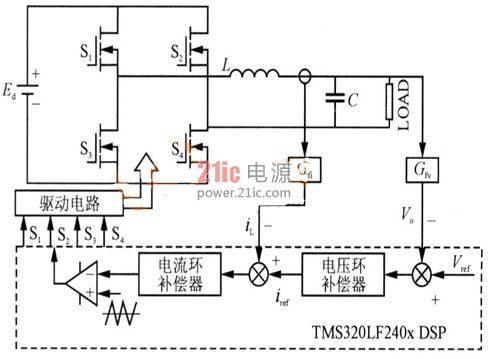
圖1為基于DSP的逆變器系統控制方案的示意圖,如果系統引入電感電流內環,不僅可以增加系統的穩定性,還能適當降低諧振峰值。因此,在重復控制電壓外環的內部加入電流內環,構成重復控制雙環,可以增加重復控制系統的穩定性,還能降低補償器設計難度。

圖2
圖2是數字控制系統的結構框圖。系統模擬部分主要是功率電路和接口電路,數字部分。接口電路是設計時需要特別考慮的,它需要實現數據的轉換(A/D,D/A),針對不同的A/D,還需要特別設置電平轉換電路。而門極驅動電路不僅要提供足夠的能量以驅動功率模塊,還需要隔離,以保護數字芯片。最后通過數字部分的編程,實現數字控制。
根據內模原理,重復控制設計的基礎是受控系統穩定,然后加入重復內模,以獲得周期性輸入或干擾的無靜差特性。設計重復控制系統需要知道受控系統的精確模型,這樣才能設計出滿足穩定域關系的補償器。加入重復控制器后的系統如圖3所示。
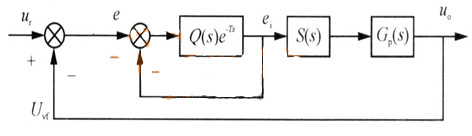
圖3逆變器重復控制系統框圖
圖1中T是基波周期;S(s)為需要設計的補償器;Gp(s)為受控系統的平均模型,即式(3)。
為簡化分析,忽略濾波電感等效串聯電阻rL和濾波電容等效串聯電阻rc,將Kvf,Utr、Ud恒定增益環節視為單位增益,可以得到簡化為單位反饋的逆變器平均模型,即:

由圖1可以獲得重復控制系統的開環傳遞函數為:

由于純延時環節e-Ts的存在,模擬上難于實現,需要將其離散化,從而采用離散系統的分析方式。其中e-Ts=z-N,N為一個基波內的采樣次數。Q是用于改善重復控制器內模臨界穩定特性的,可以是一個略小于l的參數或低通濾波器,常數型Q和函數型的對比,函數型在低頻段具有更高的增益,穩態特性將更加理想,不過也能看出它會引入相移,因此,需要再針對它設計相位補償,設計不好,系統有可能不穩定,反而達不到預期的穩定性補償效果,因此,在通常的設計中,常選擇常數性Q=0.95作簡化設計。
本文對基于DSP的逆變電源控制電路部分進行了講解,通過圖文并茂的方式來幫助初學者加強對逆變電源的認識。對逆變電源感興趣的朋友不妨花上幾分鐘來閱讀本文,相信會有意想不到的收獲。







評論