MIT團隊研發算法 自動駕駛汽車變道自如

據外媒報道,當地時間5月23日,在澳大利亞布里斯班舉行的機器人和自動化國際會議(ICRA)上,來自麻省理工學院(MIT)的研究人員將展示一種新型系統,使無人駕駛車輛能像人類駕駛員一樣自如變道。
本文引用地址:http://www.j9360.com/article/201805/380457.htm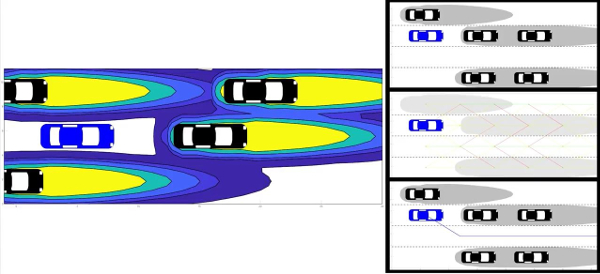
控制變道的算法是自動駕駛汽車領域的重要研究課題。但目前大多數的變道算法都存在一定的缺點,要么依賴于駕駛環境的詳細統計模型,此模型很難組裝,動態分析也比較復雜;要么模型太簡單,導致不切實際的保守決策,如汽車根本不變道。
麻省理工學院計算機和人工智能實驗室(CSAIL)研發的新變道算法,把兩種模型之間差別分割開來,允許比簡單版本更加激進的變道,但要依賴于其他車輛方向和速度的即時信息來做出決策。
自動駕駛車輛避免碰撞的標準方法是計算駕駛環境中其他車輛周圍的緩沖區,計算不止描述其他車輛的當前位置,還會描述他們在特定時間范圍內的可能位置。
MIT研究人員的系統運用了一種數學上非常有效的方法來計算新的緩沖區,并提供了避免碰撞的證據。只用幾個方程式變量來定義車輛的新緩沖區,該系統非常簡單,能即時進行動態評估。
CASIL的研究員Alyssa Pierson解釋說,自動駕駛車輛不是直接通信,而是在不矛盾或不碰撞的情況下,與算法同時運行。
電氣工程和計算機教授兼CSAIL主任-Daniela Rus表示,此優化方案能確保變道時的導航,模擬所有駕駛風格,并提供安全保證。






評論