解讀兩種機器視覺系統電路設計方案 —電路圖天天讀(77)

機器人行走電路由驅動電路和直流電機的正反轉電路兩個單元構成。電路通過運用555構成的多諧振蕩電路,同步計數器74LS196,七段譯碼器74LS248,雙JK觸發器等基本單元電路,通過上述基本電路的級聯組合,構成機器人行走電路。電路有效地實現機器人的行走與后退,通過調節阻值的大小而控制行走的時間,時間在數碼顯示管顯示。利用三極管的導通和截止控制機器人的行走方向,從而滿足設計電路的要求。
本文引用地址:http://www.j9360.com/article/201710/369380.htm電路原理系統框圖
方案一 電路圖
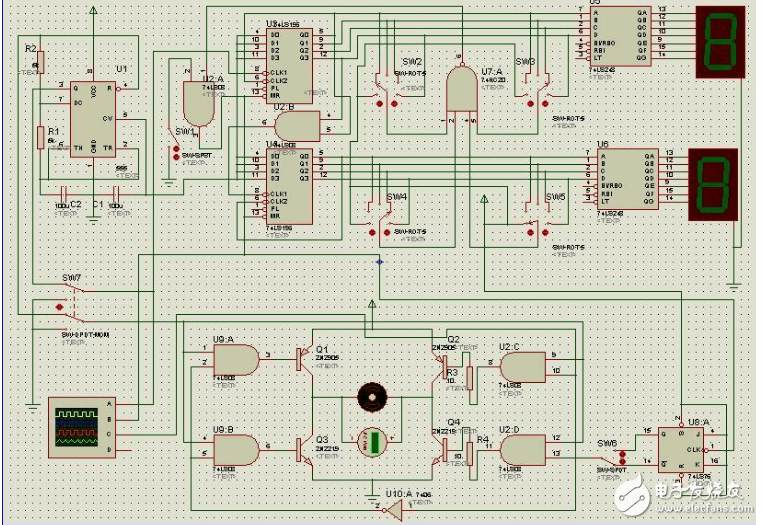
555構成多諧振蕩電路產生方波信號,74LS196構成十進制計數器,74LS248控制七段共陰極數碼管顯示電路顯示,計數器計數滿產生觸發信號觸發雙JK觸發器,雙JK觸發器在觸發信號的作用下輸出發生高低電平跳變,觸發器發生信號驅動直流電機兩端壓差發生正負跳變,直流電機正反轉,實現機器人的前進和后退。電路中各個開關控制電機的轉動及轉動方向和時間。
方案二 電路圖
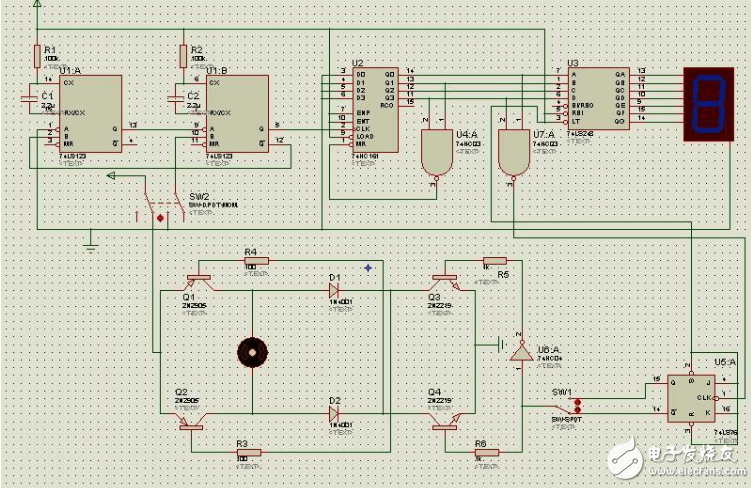
74LS123構成的定時器產生矩形波信號,用74HC161和與非門74HC03構成加十進制計數器,74LS248控制七段共陰極數碼管顯示電路顯示,計數器計數滿產生觸發信號觸發雙JK觸發器,雙JK觸發器在觸發信號的作用下輸出發生高低電平跳變,通過直流電機驅動電路改變電機兩端電壓方向,進而改變電機轉向。電路中開關也可是電機制動,正反轉。
機器人行走電路工作原理
555構成的多諧振蕩電路產生方波信號接到74LS196時鐘端觸發74LS196加計數器計數,并通過74LS248驅動七段共陰極數碼管顯示計數。加計數器計數滿十,通過74HC20與非門產生下降沿信號驅動雙JK觸發器使JK觸發器構成的T‘觸發器輸出取非,從而驅動三極管構成的開關電路,通過各個三極管的導通與截止來實現直流電機兩端的壓差的正負跳變,驅動直流電動機的正反轉,實現小車的前進與后退。其中,通過調節四個單刀五擲開關可以改變多諧電路輸出方波周期,來調節小車的前進與后退的時間。
多諧振蕩電路產生方波信號接入到74196時鐘端,驅動74196進行加計數。圖中74196接成了10進制加計數器,計數滿十時通過74HC20與非門接入到清零端進行清零。由于計數到10時,便會立刻清零,不會在數碼管上顯示,所以此時信號很弱,不可以作為觸發信號驅動JK觸發器,JK觸發器觸發信號是計數到9時,通過74HC20輸出下降沿信號觸發。數碼顯示電路通過,74LS248驅動的七段共陰極數碼管進行顯示。
電子發燒友網技術編輯點評分析:
該機器人行走電路基本符合經過固定周期后自動前進和后退,自動計時,使用5V電壓的干電池以及機器人行走的時間可調等基本要求。 (1)電機的以能耗制動的方式停止轉動:可用一電阻與電機并聯實現能耗制動;(2)電機速度的調節:可用滑動變阻器與電機串聯,通過改變電阻來改變電機轉速,不過只能定性的調,由于電機轉速和多個物理量相關,因此這種方法要慎重;(3)可適當優化線路排布,方便擴展。
大家如有問題,歡迎在評論處討論。
——電子發燒友網整理,轉載請注明出處!
智能照明技術資料匯總——用你的設計智慧點亮智能照明之燈






評論