深度解析醫療機器人發展現狀與應用前景

根據波士頓咨詢的預計,現在每年醫療機器人的營收是40億美元,2020年將達到114億美元,成為第二大機器人市場。本文為新智造推出的醫療機器人專題的第一篇,梳理醫療機器人的歷史發展軌跡,從而窺探未來市場的無限可能。新智造作為旗下欄目,關注智能時代的創新與創造,目標是找到值得創業和投資的機會。后續我們還將帶來行業玩家、資本以及初創企業等更多關于醫療機器人的報道,敬請期待。
本文引用地址:http://www.j9360.com/article/201704/346655.htm醫療機器人這種叫法可能有點誤導,會讓人聯想到獨立操作預編程任務,而無需監督的機器。這樣的應用在工業上很流行,但在處理人體任務時,人的技能也是非常重要的。

一般認為,醫療機器人應該是醫療器械,但又不同于醫療器械。它能夠輔助醫生,擴展醫生的能力,智能水平也會不斷增長,同時也要滿足以下三個方面:醫用性、臨床適應性以及良好的交互性。
醫療機器人在最近幾十年才開始被使用,但他們的存在感正在急劇加強。
根據波士頓咨詢的預計,現在每年醫療機器人的營收是40億美元,2020年將達到114億美元。這其中最知名的醫用機器人公司Intuitive Surgical在2014年的營收就達到了21億美元。而得益于醫用機器人的快速增長,未來商業機器人會取代軍用機器人,成為第二大機器人市場,市值達到170億美元。
醫療行業對機器人感興趣的原因很多,這可以與制造業中采用自動化機械的原因作比較。這不是說醫療機器人解決的問題是一樣的,但所帶來的益處無疑是相似的。機器人為行業帶來的好處,可能比最專業和最勤奮的醫療工作者更多,主要包括速度、準確性、可重復性、可靠性和成本效益。一個機器人不管用得多久,都不會疲勞,它在第一百次使用時的準確性,也與第一次使用時一樣。
就目前來說,醫療機器人主要分為以下幾類:
外科手術機器人:可用于手術影像導引和微創手術,多數由外科醫生控制,醫生掌握輸入設備,機器人按指令在患者身上操作。
康復機器人:用于輔助和治療老年、永久或臨時的殘疾患者以及行動不便的人群,用戶通過視覺反饋和各種輸入設備控制機器人,從而執行簡單的任務,例如將食物放在口中,或翻書,或站立和行走等。
醫用服務機器人:常見形式是在醫院中運輸類移動機器人,用于取藥或分配藥物,還有消毒和殺菌機器人等,可以解決醫院工作人員供不應求的問題,分擔一些沉重而繁瑣的工作。
實驗室機器人:用于進行本藥或進行重復性的實驗,比如艾滋病毒檢測,可以節省時間,為其他目的騰出人力,主要普及原因是能夠以高速,可靠和無疲勞的方式執行重復任務。
當然,上面的分類不一定能涵蓋所有醫療用的機器人,其它還有用于陪伴的情感類機器人,它們可以幫助治療癡呆癥和認知障礙,也能用于康復類型的家庭護理。
據統計,目前手術機器人占比最高,在六成以上。這主要利益于它發展的較早,實用性和效果最為顯著。不過隨著機器人和人工智能類技術的發展,康復和服務機器人也在迎頭追趕。下文中會重點介紹手術機器人的歷史。
一項技術的起源往往植根于其前身的優勢和劣勢,而對于手術機器這,這位前者就是腹腔鏡手術。
腹腔鏡設備本身無法提供觸覺反饋(力和觸覺),也沒法讓手眼實現自然協調和靈巧操作。在觀看二維視頻監視器的同時移動腹腔鏡儀器,也有些違反直覺。另外,操作時儀器要與顯示器上所瞄準目標相反的方向移動。這些都讓腹腔鏡的優點難以發揮,而為了克服這些限制,也就推動了手術機器人的發展。
手術機器人的首次使用,是1985年的PUMA 560,它可以精確控制神經外科活檢。三年后的1988年,PUMA 560被用在了前列腺手術中。該系統也促成了PROBOT的出現,它是一個專門為前列腺手術設計的系統。
在PROBOT開發的同時,Integrated Surgical Supplies也在開發另一款機器人。1992年ROBODOC誕生,這一機器人可協助外科醫生進行了全髖關節置換手術,它也是第一個獲得FDA批準的手術機器人。
同樣是在20世紀80年代中后期,美國國家航空航天局NASA的Ames研究中心的一組成員在研究虛擬現實技術時,對使用這種技術開發遠程呈現(telepresence)手術生起了興趣。這種遠程外科手術的概念也成為手術機器人發展背后的主要動力之一。
在90年代初,Ames團隊的幾位科學家加入了斯坦福研究所SRI。與SRI的其他機器人以及虛擬現實專家合作,這些研究者開發了一種用于手術的靈巧的遠程手術操作器。他們的主要設計目標之一,是給外科醫生提供直接在患者身上進行手術的感覺,而不是像在其它房間做手術。
在開發這些機器人的過程中,一些普通外科醫生和內鏡醫師也加入了開發團隊,并意識到,這些系統在改善常規腹腔鏡手術的局限性方面具有很大的潛力。
另一方面,美軍也注意到了SRI的工作,并對通過遠程呈現“將外科醫生帶到受傷士兵身邊”,降低戰時死亡率的可能性很感興趣。在美軍資助下,研究人員設計了一種系統,其中受傷的士兵會被放入配備了機器人手術設備的車輛中,然后由附近的移動高級外科醫院(MASH)的外科醫生遠程操作手術。
這套系統備受期待,很可能防止士兵在到達醫院前過度失血,從而減少戰時死亡率。該系統已經在動物模型上取得成功,但還沒經過實際戰場傷員護理測試。
后來,幾位為在美軍開發手術機器人系統的外科醫生和工程師,成立了一家商業公司Computer Motion,開始將機器人技術引入民用手術領域。值得注意的是,這家公司獲得了美軍的種子資金,并開發出了自動內窺鏡優化定位系統(AESOP),這是一種由外科醫生控制的機器人手臂,用于操縱內窺鏡攝像機。
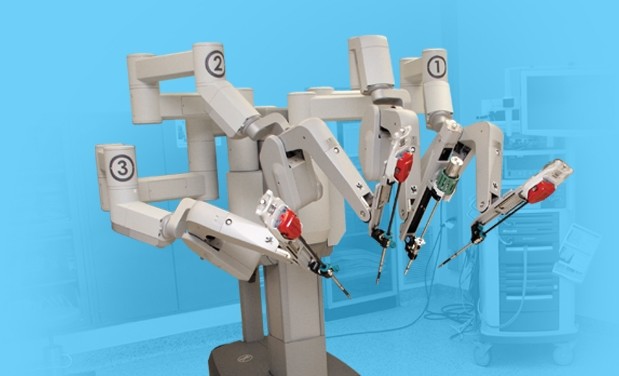
AESOP上市后不久,Integrated Surgical Systems公司(也就是現在的Intuitive Surgical)獲得了SRI Green Telepresence Surgery手術系統的授權。然后他們對該系統進行了廣泛的重新設計,并最終成為了達芬奇手術系統。2000年,達芬奇機器人獲得FDA批準,成為第一個綜合腹腔鏡手術機器人系統。
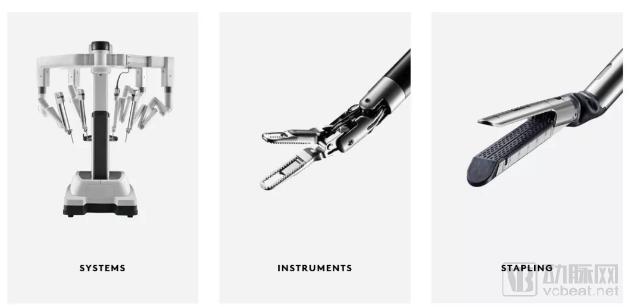
達芬奇手術系統主要包括三個部分:手術控制臺、控制系統以及機械臂。醫生坐在手術控制臺上對電腦做出相應的指令,攝像頭提示人體器官里面的相應情況,醫生依據這些反饋信息做出手術決策。
在達芬奇誕生后的一年中,Computer Motion的Zeus系統也投入生產。手術機器人系統此后一段時間的發展,基本由上述兩家公司主導。此后在2003年,Intuitive Surgical收購了Computer Motion,Zeus系統也不再積極銷售。

手術的發展一樣,其它類型的機器人,如假肢和外骨骼等,也有了巨大的進步。





評論