隨動式車載光電搜跟系統研究

作者 李釗 孫健 上海航天控制技術研究所(上海 201109)
本文引用地址:http://www.j9360.com/article/201703/345940.htm李釗(1986-),男,博士生,工程師,研究方向:機電一體化; 孫健,男,碩士生,工程師,研究方向:仿真轉臺控制器研究。
摘要:為滿足武器系統外場試驗對目標、背景及干擾的數據采集及其它制導系統的性能驗證,本文設計了一種隨動式車載光電搜跟系統。利用光學跟蹤平臺實現對動態目標的搜索和跟蹤,同時控制車載轉臺隨動,車載轉臺可搭載導引頭等其它光學探測設備,提高了系統的負載能力。針對系統延時帶來的跟蹤誤差,采用卡爾曼濾波算法對目標位置進行預測。試驗結果表明,加入預測算法后,跟蹤平臺運動更加平穩,跟蹤精度得到提高。針對設備間由于坐標不一致及安裝精度和零位偏差帶來隨動誤差,通過位置補償對隨動控制指令進行修正,改善了隨動觀測精度。系統采用模塊化設計,可靠性高,可用于武器系統的外場試驗。
引言
光電搜跟系統作為一種現代化探測和偵查手段,廣泛應用于無人機、偵察車、船舶等軍事和民用領域[1-3]。利用紅外、微光、可見光、激光等光學探測設備,光電跟蹤系統可對空中及地面目標進行搜索和捕獲,同時通過計算脫靶量控制伺服系統運動,實現對目標的實時跟蹤。為了方便攜帶、增加搭載設備的有效載荷及隱蔽偵查等方面的需要,光電搜跟系統逐步向著小型化和輕量化方向發展[4-5]。為了提高搜跟精度和機動性能,光電搜跟系統的搭載能力受到了一定的制約,通常僅能搭載有限的光學設備。
武器系統外場試驗時,導引頭等精密制導設備由于視場較小而難于發現動態目標,其它探測設備,如紅外熱像儀、紫外成像儀等由于設備較重,通常需要放置在云臺上由人工手動推動實現動態目標觀測,因而對于機動性較大的目標觀測極為不便。本文提出一種隨動式車載光電搜跟系統,滿足對目標搜索和跟蹤的同時,提高了系統的負載能力。系統跟蹤精度高,性能穩定。此外,系統集成在測試車上,可方便外場試驗對目標、背景及干擾彈的各波段輻射能量進行采集,并完成相應的試驗任務。
1 系統組成
系統由光電跟蹤平臺、車載轉臺系統和控制采集系統三大部分組成。光電跟蹤平臺包含紅外探測器、激光測距機和伺服運動機構。工作時,平臺升出車廂頂部,實現360°對空搜索。可搭載導引頭及其它光學探測設備(長波紅外熱像儀、紅外成像光譜儀、光譜輻射計等),并在跟蹤模式下隨光學跟蹤平臺運動,實現搭載設備對動態目標的觀測,車載轉臺負載能力大于50kg。

控制采集系統由存儲顯示計算機和控制采集計算機組成。存儲顯示計算機用于進行試驗參數設置、試驗過程監控、數據存儲及數據回放分析;控制采集計算機用于采集試驗過程中產生的各種數據,如導引頭數據、光學設備探測數據、轉臺運動數據、雷達數據和GPS等數據,并將試驗數據發送至存儲顯示計算機進行監控和存儲。系統工作原理如圖1所示,系統實物如圖2所示。

2 系統軟硬件設計
為實現動態目標的高精度搜索和跟蹤,減少數據傳輸和信號處理帶來的系統延時,對系統性能和實時性提出了較高的要求。
系統采用模塊化設計,各分系統采用上下位機模式,實現控制與讀顯操作分離。上位機主要用于人機交互,硬件平臺基于工業控制計算機架構,軟件平臺基于windows平臺,程序采用模塊化設計,具備用戶管理、參數設定、數據監控、錯誤處理等功能。下位機主要用于各分系統之間數據傳輸、圖像處理、目標解算、伺服控制等,要求實時性高、數據處理能力強,本系統中各分系統控制周期統一為1ms,各下位機之間采用千兆以太網進行數據交互。光電搜跟平臺下位機采用DSP設計,芯片選用TMS320F28335,主要用于光電搜跟平臺伺服控制、跟蹤預測及位置信息發送;采集控制系統下位機采用PXI架構,軟件編寫基于LabVIEW RT實時操作系統,用于實現光電跟蹤平臺位置信號采集、目標位置預測和補償、車載轉臺控制指令解算和發送、其它分系統信號和系統狀態采集等;車載轉臺下位機采用PCI架構,軟件編寫基于Vxworks實時操作系統,用于實現車載轉臺閉環控制,控制指令接收及實時運動狀態反饋。
光電搜跟平臺技術指標:俯仰跟蹤范圍為﹣15°~﹢75°,方位跟蹤范圍為﹣135°~﹢135°,最大跟蹤角速度不小于60°/s,軸線誤差不大于0.2°,標準能見度下,紅外熱像儀探測距離大于15km,激光測距大于10km。
3 系統精度分析
3.1 跟蹤預測
為保證隨動系統的跟蹤精度,要求光電跟蹤平臺伺服機構運動平穩且對大機動目標能夠快速響應、精確跟蹤。然而由于測量噪聲及系統滯后等因素的影響,系統跟蹤能力受到了一定的制約。本系統中紅外圖像跟蹤器主頻是25Hz,從而由圖像處理帶來40ms的系統延時,當目標機動性較大時,該延時足以使目標脫離視場范圍,造成目標丟失。試驗時發現,平臺跟蹤過程中激光中靶率不足80%,目標機動性大時跟蹤能力不足,伺服平臺運動曲線不夠平滑,目標丟失現象時有發生。
為消除系統滯后,提高跟蹤精度,需要對目標的運動特性進行預測。常用的預測算法包括最小二乘濾波[6]、維納濾波[7]、卡爾曼濾波[8]等,本系統采用卡爾曼濾波算法對目標進行預測。
3.1.1 卡爾曼濾波[9]
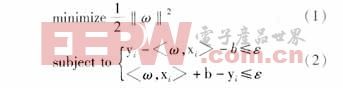
離散系統動態方程由運動方程(1)和觀測方程(2)構成,具體表述如下:


根據系統方程,可由卡爾曼濾波器對脫靶量即目標位置信息進行預測
3.1.2 試驗分析
對某民航飛機進行觀測,光電跟蹤平臺跟蹤過程中實時圖像如圖3所示,目標飛機位于跟蹤框內,圖像上方顯示目標的距離、高度,以及伺服機構的位置信息。






評論