STM32的模糊控制快捷貨車電子防滑器的研究

摘要:本文針對目前鐵路快捷貨車制動防滑效率不高的現狀,提出了一種以STM32F103為控制核心的電子防滑器,介紹了電子防滑器的工作原理以及硬件組成。該系統采用模糊控制方案,進行二維模糊控制器的設計,并在MATLAB/Simulink中建立了快捷貨車的制動防滑仿真模型。仿真結果表明,采用模糊控制時,系統的穩定性增強、調節時間短、響應速度快且具有較強的魯棒性。最后分析了系統軟件設計。
本文引用地址:http://www.j9360.com/article/201609/310486.htm引言
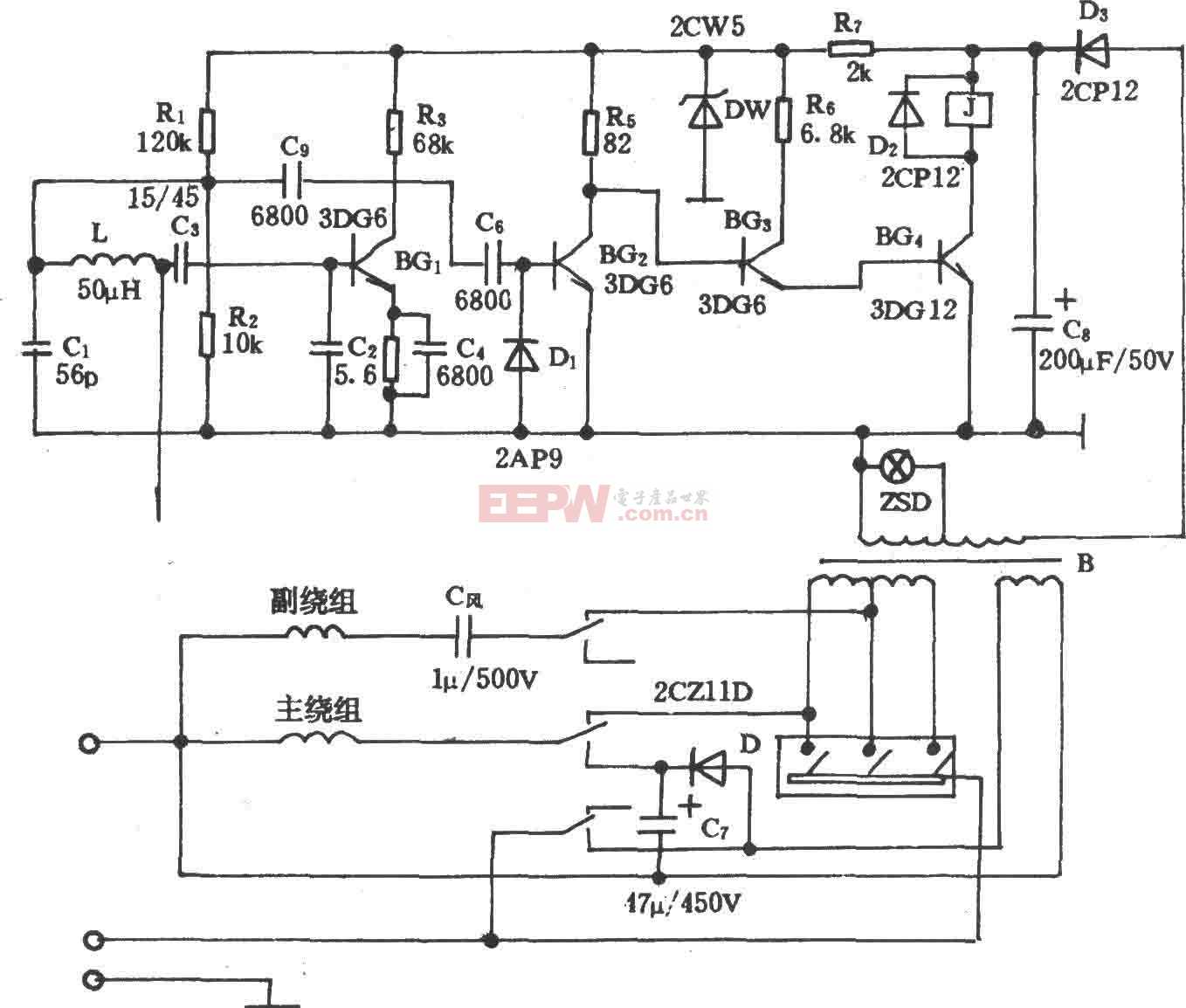
隨著鐵路貨運的發展,時速160km/h的快捷貨車防滑制動技術成為研究的重要課題。目前,中國鐵路總公司下達的科研計劃《160km/h快捷貨車關鍵技術研究》明確提出了開展快捷貨車防滑器安全技術的研究。由于受粘著限制,快捷貨車在制動過程中容易發生滑行,導致車輪或軌面擦傷。因此,可靠的防滑控制是提高快捷貨車制動效率、確保行車安全運行的關鍵。傳統的機械式防滑器存在靈敏度低、響應慢、制動效果差、易磨損等缺點。基于此,本文提出了一種以STM32為防滑控制器,以模糊控制為算法的電子防滑器。該防滑器通過實時采集4個車軸上速度傳感器發出的脈沖信號,計算各軸速度和輪減速度,通過比較軸速獲得整車速度,以計算滑移率。再將計算結果與多滑行判據進行比較,一旦檢測到某軸發生滑行,即控制該軸防滑電磁閥充放氣、調節制動缸壓力,防止車輪繼續滑行。快捷貨車電子防滑器的原理圖如圖1所示。

1 系統硬件設計
系統硬件總體設計方案如圖2所示。采用模塊化設計思想,主要包括電源模塊、主控模塊、速度信號采集與調理模塊、排風閥驅動模塊、故障檢測模塊、存儲與顯示模塊。

1.1 電源模塊
為了使電子防滑器穩定可靠地工作,一個性能優質的電源是十分必要的。電子防滑器的外部電源使用的是車軸動能供電裝置[1],該裝置內部經過電源管理后可給防滑控制器各個模塊正常供電。由于系統各個用電元件的供電電壓不同,故在電源模塊中需進行DC/DC轉換電路設計,使防滑控制器穩定可靠地工作。
1.2 防滑控制器主控模塊
防滑控制器的主控芯片選用的是ST(意法半導體)公司基于ARM Cortex-M3內核的32位微控制器STM32F103ZET6,其內核架構先進,性能優越,最高工作頻率可達72MHz,執行效率高,并擁有豐富的外設資源。利用其通用定時器的捕獲/比較通道可捕捉到外部引腳電平的跳變,可方便地用于速度信號的測量。此外,完成防滑控制用到的片上資源還包括:SRAM、GPIO、ADC、DMA、USART、外部中斷接口、I2C接口和內部看門狗等。
1.3 速度信號采集與調理模塊
速度傳感器采用霍爾式傳感器,主要負責采集各輪對的實時轉速,經過信號調理(光電隔離)后提供給主控單元進行處理。
1.4 防滑排風閥驅動模塊
排風閥是執行部件,排風閥驅動模塊用于將控制器輸出的弱電信號轉換為驅動電磁閥的功率信號,從而實現防滑控制。
1.5 故障檢測、存儲與顯示模塊
電子防滑器需要具備一些附屬功能,如故障檢測、存儲與顯示功能。當速度傳感器與防滑排風閥出現故障時,能夠將故障信息存儲下來,在貨車停車檢修的時候通過顯示操作面板獲取、清除故障信息。
2 模糊控制器的設計與驗證
由于快捷貨車輪軌黏著多變、受外界各種影響因素較多,因此很難提取出線性模型來描述,而且鐵路現場實驗費用非常高。模糊控制方法的優點是不需要精確的數學模型,利用模糊分析和專家經驗確定模糊控制規則,在處理非線性控制系統時,變控制系統以及不確定性控制系統有其自身的優勢。因此,把模糊控制理論引入到電子防滑器的設計中無疑是一種很好的選擇。下面將對模糊控制器的設計與驗證過程進行分析討論。

2.1 模糊控制器的設計
2.1.1 精確量模糊化
電子防滑器的滑行判據主要包括速度差、減速度、滑移率以及減速度微分等[5-7]。本文選取滑移率E和受控輪減速度EC為輸入變量,制動缸壓力的調整量U作為輸出變量,在MATLAB/Simulink環境中進行二維模糊控制器的設計。其中滑移率的基本論域為[0,0.26],減速度的基本論域為[-4,+4]。滑移率的模糊論域范圍設定為[0,6],模糊語言變量分為5級:NB、NS、ZE、PS和PB;減速度的模糊論域范圍在[-6,+6],模糊語言變量分為 7級:PL、PM、PS、ZE、NS、NM和NL。由此可得,滑移率的量化因子為KE=6/0.26=23.08,減速度的量化因子為KEC=6/4=1.5。制動缸壓力的調整量為最終輸出變量,范圍設定在[-100%,+100%],模糊論域為[-6,+6],其量化因子為KU=1/6。在設計模糊控制器時,能否適當選取KE和KEC,對系統響應速度和實際調整量有較大影響[4]。
2.1.2 確定模糊控制規則
模糊控制規則對模糊控制器的控制效果影響最為突出,它源于操作人員的經驗和常識,通過經驗歸納或合成推理而得來。本文結合了對電子防滑器的既有經驗和對模糊控制的反復實踐[5-8],總結出了如表1的模糊控制規則。

2.1.3 解模糊
模糊控制器要實現其控制,必須要產生一個精確量,才能被相關執行機構所接受。解模糊就是將模糊推理得到的模糊控制量轉化為精確量的過程。根據上述得到的模糊控制規則,采用重心法求取各個相應的控制量[6],可得該系統模糊控制器的控制表,如表2所示。

將表2固化到STM32的ROM中,以便電子防滑器的軟件開發。本文采用離線查詢法實現模糊控制[5-6]:通過軟件編程,將模糊控制的輸入量先進行離散化,再通過模糊推理制成模糊控制離線查詢表,在實際的防滑控制過程中只需測得模糊輸入的量化值,通過查表即可得到模糊控制的輸出。
2.2 模糊控制器的驗證
為了實現模糊控制器性能的驗證,本文選用中車眉山車輛有限公司的160km/h快捷貨車樣車相關數據作為數學模型[3],在Simulink仿真軟件中搭建了快捷貨車防滑控制的仿真模型,如圖3所示。
模糊控制子模塊根據輸入的防滑判據,查詢模糊控制器輸出制動缸壓力;被控車輪模塊根據輪對受力分析理論計算并輸出輪減速度和輪速到相關模塊;整車模塊根據整車制動力計算整車減速度和制動距離,以便計算滑移率。粘著限制模塊根據整車速度計算粘著系數,并通過設定制動距離讓車輪進入打滑狀態。設定初速度為44m/s(約160km/h),制動缸壓初始量為450KPa,仿真結果如圖4所示。

從仿真結果來看,打滑時輪減速度得到有效的控制,且調節時間短、響應速度快,具有較強的魯棒性。可以說明,采用模糊控制時,系統取到了理想的防滑控制效果。
3 系統軟件設計
系統軟件主要分為兩大部分:第一部分為系統初始化部分,主要包括GPIO初始化、定時器初始化、ADC初始化、控制參數初始化等。第二部分為主控制循環部分,主要包括速度測量與計算子程序、防滑控制子程序、故障檢測子程序和停車處理子程序。速度測量與計算子程序主要完成速度信號的實時檢測、計算輪速和輪減速度,得到整車速度,進而計算滑移率。防滑控制子程序主要包括滑行檢測和模糊控制兩部分,系統首先進行滑行狀態的定時檢測,以判斷各車輪在運行過程中是否打滑,若發生打滑,則進入模糊控制子程序,再根據滑行判據,利用離線查表法輸出模糊控制量。故障檢測子程序主要檢測防滑器關鍵部件(如速度傳感器、防滑閥)是否正常工作,如有故障應該作出相應的控制:當檢測到某速度傳感器發生故障時,用鄰軸正常的速度值進行替換;在檢測到某防滑閥功能異常時,則屏蔽其控制信號,對應車軸實施一般的正常制動。停車處理子程序是在貨車停車檢修的情況下,列檢人員通過按鍵操控實現系統的自檢、故障顯示與清除功能,以便防滑器的檢修與維護。
系統軟件流程如圖5所示。系統上電或復位后,先執行系統初始化程序,然后進入主控制循環程序。主控制程序中先執行故障檢測子程序,如果系統正常,則進入速度測量與計算子程序,得到滑移率和減速度。當整車速度大于3km/h時[5],則執行防滑控制子程序;否則不進行防滑控制,此時若有按鍵操作,則進入停車處理子程序。

4 結語
高性能的防滑控制器及先進的控制算法,對快捷貨車制動系統性能的提高具有重要意義。本文提出了一種以STM32F103為防滑控制器、以模糊控制為算法的電子防滑器,在軟硬件設計上,采用模塊化設計思想,有效提高了快捷貨車防滑控制的實時性和準確性,彌補了以往機械式防滑器在滑行控制動態性能上的不足;在防滑控制算法上,選取滑移率和減速度為防滑判據進行二維模糊控制器的設計,并運用MATLAB/Simulink仿真工具搭建仿真模型進行仿真驗證,最后證明采用模糊控制算法進行電子防滑器的設計是一種可行的方式。
參考文獻:
[1]陳子康.列車車輪動能發電機:中國,200720081028[P].2007-09-11.
[2]朱迎春.國外160km/h快速貨車制動系統[J].國外鐵道車輛,2004(11):109~111.
[3]李培曙.我國快速貨車上使用防滑器的可行性探討[J].鐵道車輛,2002,08(40):15-17.
[4]金學松.輪軌蠕滑理論及其試驗研究[M].西南交通大學出版社,2006:102-113.
[5]滕曉濤.基于DSP的快速貨車電子防滑器的研究[D].成都:西南交通大學,2012.
[6]姚壽文.長大貨物列車電控空氣制動系統及防滑器的智能控制研究[D].北京:鐵道部科學院,2000.
[7] 羅志芳. 基于模糊滑模控制的機車防滑控制器的研究[D]. 長沙:中南大學,2012.
[8] Wang Shujuan,Zhao Tiebin,Wang Zhiping. Development of synthetical Simulated Experimental System of Railway Electronic Antiskid Devices[J]. Measurement & Control Technology,2004,1(23): 63-65.
本文來源于中國科技期刊《電子產品世界》2016年第9期第33頁,歡迎您寫論文時引用,并注明出處。






評論