基于ARM7的高精度頻率計(jì)的設(shè)計(jì)

0 引言
本文引用地址:http://www.j9360.com/article/201609/303797.htm頻率是人們工作和生活當(dāng)中常用到的物理量之一。其中時(shí)間、速度等物理量都可以用頻率來表示。近年來隨著現(xiàn)代工業(yè)的發(fā)展,高精度的頻率計(jì)得到廣泛的重視與應(yīng)用,比如各大高校和科研院所的實(shí)驗(yàn)室需要用到的頻率計(jì)基準(zhǔn)。但是目前能夠滿足高精度測量要求的頻率計(jì)結(jié)構(gòu)復(fù)雜而且價(jià)格昂貴,因此設(shè)計(jì)一款精度高、成本低的頻率計(jì)就十分必要了。
直接計(jì)數(shù)法是過去經(jīng)常用到的測量頻率的方法。直接計(jì)數(shù)法包括兩種測量原理,一種測量原理是在閘門時(shí)間T不變的情況下,對被測頻率進(jìn)行計(jì)數(shù),通過所計(jì)的脈沖數(shù)N與T的比值求出相應(yīng)的頻率值;另一種原理是在給定的一個(gè)被測信號周期內(nèi)對標(biāo)準(zhǔn)頻率進(jìn)行計(jì)數(shù),通過所計(jì)的數(shù)值N0與標(biāo)準(zhǔn)頻率值求出被測頻率。但它們都存在±1個(gè)字的計(jì)數(shù)誤差。測量精度低。其次是多周期同步測量法,此方法又叫作倒數(shù)計(jì)數(shù)器法。它是目前頻率測量中應(yīng)用最為廣泛的測頻方法。多周期同步測量法的測量原理是在若干個(gè)給定的被測信號的周期中對標(biāo)準(zhǔn)頻率和被測頻率同時(shí)計(jì)數(shù),根據(jù)所測得數(shù)值求出被測頻率。它讓不同的被測頻率與實(shí)際閘門同步,這樣就去除了被測頻率的±1個(gè)字的計(jì)數(shù)誤差,但標(biāo)準(zhǔn)頻率依然還存在±1個(gè)字的計(jì)數(shù)誤差。此外還有游標(biāo)法和模擬內(nèi)插法,這兩種方法分別通過游標(biāo)振蕩器和內(nèi)插器來減小±1個(gè)字的計(jì)數(shù)誤差,能夠達(dá)到很高的精度,但是儀器結(jié)構(gòu)復(fù)雜而且成本很高。
本文利用相位檢測技術(shù),通過捕捉標(biāo)準(zhǔn)信號和被測頻率的相位重合點(diǎn),使這兩個(gè)頻率和實(shí)際閘門完全同步,從而消除了標(biāo)準(zhǔn)頻率和被測頻率中的±1個(gè)字的計(jì)數(shù)誤差,使測量中的精確度能夠達(dá)到10-10量級。但傳統(tǒng)頻率計(jì)的核心硬件設(shè)計(jì)大都使用16位單片機(jī)外接級聯(lián)的計(jì)數(shù)器,這樣不僅使電路復(fù)雜,引入不必要的誤差,無法保證測量精度,而且處理測量數(shù)據(jù)速度過慢,在當(dāng)今科研工作中已經(jīng)無法達(dá)到科研人員的科研要求。本文在此基礎(chǔ)上通過選用32位處理器ARM7作為主控芯片,比傳統(tǒng)的16位單片機(jī)提高了控制系統(tǒng)和測量數(shù)據(jù)處理的速度。
1 相頻檢測法原理及誤差分析
在相位檢測法頻率測量中有一個(gè)重要的概念就是最大公因子頻率。它的倒數(shù)為最小公倍數(shù)周期Tp。最大公因子頻率的定義為:如果對于任意兩個(gè)頻率信號和f1和f2,當(dāng)f1=M f0,f2=Nf0;其中M和N這兩個(gè)正整數(shù)沒有公共的約數(shù),那么f0就是f1和f2之間的最大公因子頻率fp。兩個(gè)信號的量化相移分辨率設(shè)為![]() ,其公式如下:
,其公式如下:

在一個(gè)Tp周期中有M個(gè)f1的周期或者N個(gè)f2的周期T2。假設(shè)M>N且以f2的上升沿作為參考,那么量化后的f1和f2在一個(gè)Tp周期中有且只有N種相位差情況,并且每種情況在一個(gè)Tp周期中各不相同。若按大小表示則為
。當(dāng)兩個(gè)信號相位差十分小時(shí),稱之為相位重合點(diǎn)。相位檢測測頻的原理就是捕捉若干個(gè)相位重合點(diǎn),在這些相位重合點(diǎn)之間有完整的整數(shù)倍標(biāo)準(zhǔn)信號和被測信號的周期,以此來設(shè)定實(shí)際的閘門時(shí)間。這樣就可以消除標(biāo)準(zhǔn)頻率和被測頻率中都存在±1個(gè)字的計(jì)數(shù)誤差。圖1為實(shí)際閘門生成的原理圖。
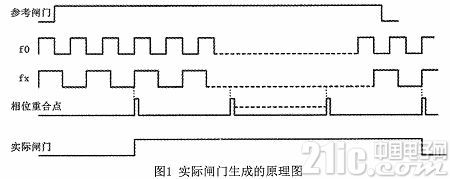
從圖1可以看出,當(dāng)參考閘門打開之后,首個(gè)相位重合點(diǎn)到來時(shí),實(shí)際閘門開始計(jì)數(shù),當(dāng)參考閘門閉合后首個(gè)相位重合點(diǎn)到來時(shí),實(shí)際閘門閉合停止計(jì)數(shù)。當(dāng)實(shí)際閘門開啟時(shí),計(jì)數(shù)器開始分別對標(biāo)準(zhǔn)頻率和被測頻率計(jì)數(shù),假設(shè)標(biāo)準(zhǔn)信號脈沖個(gè)數(shù)為N0,被測信號脈沖個(gè)數(shù)為Nx,那么被測信號頻率值為:

因?yàn)?delta;Q要遠(yuǎn)遠(yuǎn)小于Tx和T0,所以此方法能夠獲得相當(dāng)高的測量精確度。在多周期同步測量中的相對誤差與式(6)相同。其中的δN0=±1而δNx=0,所以此倒數(shù)計(jì)數(shù)器法在省略標(biāo)準(zhǔn)頻率的影響下測量相對誤差為:
由式(11)可知,被測信號的相對誤差由標(biāo)準(zhǔn)信號的周期的±1倍所引起。因此將被測頻率與標(biāo)準(zhǔn)頻率同時(shí)同步后測量的值要更精準(zhǔn)。
2 硬件電路設(shè)計(jì)
圖2為相檢頻率計(jì)的整體框圖。由于被測信號要求最大測量頻率為10MHz,測量精度達(dá)到10-10量級,因此標(biāo)準(zhǔn)信號頻率精度要至少達(dá)到10-11量級。基于此本文選用安捷倫公司生產(chǎn)的恒溫晶振10811A作為標(biāo)準(zhǔn)頻率的輸出設(shè)備,其最大輸出頻率為10MHz,準(zhǔn)確度優(yōu)于10-11。同時(shí)其具有體積小、便于產(chǎn)品設(shè)計(jì)的優(yōu)點(diǎn),因此滿足設(shè)計(jì)要求。
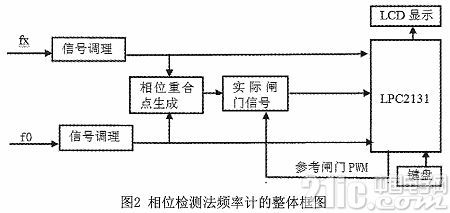
其中頻率經(jīng)過信號調(diào)理電路的目的是對輸入的信號進(jìn)行必要的整形與放大。它的輸入阻抗以及輸入電壓的靈敏度要高,以及能夠調(diào)理各種波形的周期性信號,其中良好的抗干擾能力也是必不可少的。因此本設(shè)計(jì)選擇應(yīng)用比較器ADCMP604實(shí)現(xiàn)信號調(diào)理功能,將信號整形為方波信號。ADCMP604的延遲時(shí)間大約為1.6ns,與被測信號10MHz相比可以忽略不計(jì)。與此同時(shí),電路在抑制共模干擾方面決定采用LVDS差分信號輸出來實(shí)現(xiàn)。電路圖如圖3所示。其中Vp端接被測信號,Vn端接地,當(dāng)fx大于0時(shí),Q端輸出為高電平,當(dāng)fx小于0時(shí),Q端輸出為低電平。










評論