基于ARM的直流電機數字式電子調速器設計

近年來,隨著數字電子技術的發(fā)展,電機的調速技術也得以迅速發(fā)展。數字式電子調速器以其控制精度高、響應速度快,能夠有效地提高發(fā)動機的調速性能,延長發(fā)動機的使用壽命的優(yōu)點得以廣泛應用。在此基礎上,本文設計了一種基于ARM的實時精確控制直流電機轉速的數字式電子調速器。
本文引用地址:http://www.j9360.com/article/201609/303772.htm1 直流電機調速原理
1.1 直流電機的工作原理
依據直流電機的機械特性知,直流電機的調速方案有三種:改變電源電壓;改變電樞電阻;弱磁調速(即改變勵磁磁通)。改變電樞電阻的方法會引起電機機械特性變軟,使轉速的穩(wěn)定性變差。弱磁調速在低速時受到磁極飽和的限制,在高速時受換向火花和換向器結構強度的限制,并且勵磁線圈電感較大,動態(tài)響應較差。所以在本設計中采用改變電源電壓的調速方案。
1.2 PWM控速原理
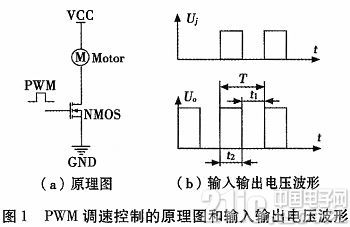
圖1是利用開關管對直流電動機進行PWM調速控制的原理圖和輸入輸出電壓波形。在圖1(a)中,當開關柵極輸入高電平時,開關管導通,直流電動機電樞繞組兩端有電壓Us。t1秒后,柵極輸入變?yōu)榈碗娖剑_關管截至,電動機電樞兩端電壓為0。t2秒后,柵極輸入重新變?yōu)楦唠娖健i_關管重復前面的動作。這樣,對應著輸入電平的高低。直流電動機繞組兩端的電壓波形如圖1(b)所示。電動機繞組兩端的電壓平均值為:
通過改變α的值可以改變電樞繞組兩端電壓的平均值,從而達到調速的目的,這是PWM調速原理。
2 數字式電子調速器設計
數字式電子調速器由控制器、執(zhí)行器驅動機構、執(zhí)行器和傳感器四部分組成。
本設計采用飛思卡爾基于ARM@Cortex@-M4內核的32位微控制器Kinetis。K60系列的MK60DN512ZVLQ10(以下簡稱K60)控制器,其工作電壓2.7 V-5.5 V,總線頻率可達100 MHz,其擁有512 kB的FLASH和128 kB的SRAM。它能完成電擊調速、控制運算、檢測調速器工作狀態(tài)以及與外部設備通信聯(lián)絡等功能。執(zhí)行器驅動機構由H橋驅動電路構成。執(zhí)行器為伺服直流電機。傳感器選用歐姆龍集團的E6A2-CW3E光電編碼器。此外為了調試方便,采用藍牙串口通信模塊作為與上位機通信模塊。
2.1 調速器結構
本設計由K60作為控制器,完成與上位機之間的通信,同時通過采集車輪轉速與設定值進行比較,然后采用PWM對電機轉速進行調控。
2.2 ARM接口電路的設計
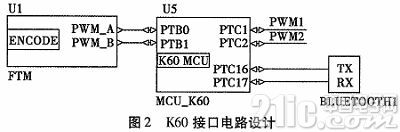
K60內部集成了正交解碼,PWM輸出以及串口通信外設。光電編碼器可以對電機的轉速進行測量,該光電編碼器通過齒輪與電機齒輪相嚙合,電機轉動時編碼器會產生A、B相脈沖,兩相脈沖信號相位相差90°。編碼器產生信號后,K60對應的GPT0口將采集PWM信號,此時A相信號作為方向判斷信號,即當A相超前B相90°時,電機正轉;A相滯后B相90°時,電機反轉。B相信號作為電機轉速信號使用。圖2為K60接口電路的設計。
2.3 電機驅動電路
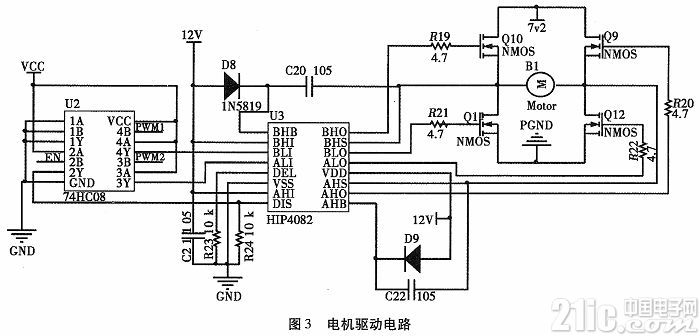
電機驅動電路使用74HC08與門、HIP4082芯片作為K60與H橋之間的橋梁。74HC08接收K60產生的PWM信號,經過與運算產生PWM信號。HIP4 082芯片具有隔離功能,對K60起到保護作用,另一方面HIP4082為NMOS提供合適的漏、源電壓使H橋相應橋臂導通進而對電機進行驅動。圖3為電機驅動電路。
2.4 串口通信模塊
由于藍牙具有串口通信功能,且藍牙傳輸輕巧方便,通信簡單,故采用藍牙模塊與上位機進行通信。
3 調速器軟件設計
本設計采用轉速負反饋和PI調節(jié)器的單閉環(huán)負反饋進行調速,該調速器可以保證在系統(tǒng)穩(wěn)定的條件下實現(xiàn)無轉速靜態(tài)誤差。
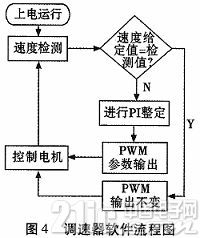
本設計由K60通過光電編碼器測得電機轉速的實際值與目標值進行對比產生誤差值。誤差值經過PI調節(jié)器后產生PWM輸出值,由K60輸出PWM到電機驅動電路對電機轉速進行調節(jié)。軟件流程圖如圖4所示。
4 調試
上位機通過串口通信給K60傳遞調速器的參數和電機速度的沒定值。K60通過比較分析實際值與設定值之差,經由調節(jié)器計算得出控制電機的PWM輸出值。例如:上位機設定電機轉速為1.5 m/s,設定值經串口通信傳遞給下位機。同時下位機將測得數據反饋到上位機,數據有0.084 s的上升時間,峰值為1.55 m/s,超調量為3.3%,調整時間為0.208 s。如圖5所示。
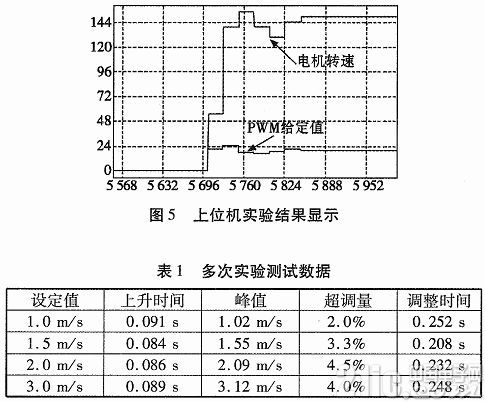
通過數次實驗得出如下數據見表1。
表1中的數據說明,所設計的調速器可以實時精確控制電機轉速,具有超調量小,調整時間短的特點。
5 總結
本文設計的基于ARM的直流電機數字式電子調速器,充分利用了飛思卡爾K60處理器中的資源,降低了調速器系統(tǒng)的復雜性,而且系統(tǒng)所具有的實時調控、超調小、調整時間短、無轉速靜態(tài)誤差等特點可以促進該系統(tǒng)在各方面的廣泛應用。








評論