基于CAN總線的電動汽車能量回收系統研究

1 引言
本文引用地址:http://www.j9360.com/article/201609/303365.htm現場總線技術(field bus)由于其造價低廉又能滿足工業現場環境下的通信要求而成為一種新型的通信方式。其中can(controller area network)總線正是當今流行的一種較為先進的、性能出色的現場總線技術。電動汽車能量管理系統需檢測和交換大量數據,采用硬接信號線的方式難以解決問題,且繁瑣復雜、成本較高,采用can總線來實現其內部的數據通信則是一種有效的方法。文中研究了一個can網絡節點-電動汽車能量回收模塊,并介紹了一種基于can總線的dc-dc控制器的設計。
2 can總線
can總線是德國bosch公司為汽車監測、控制系統而設計的一種有效支持分布式控制和實時控制的串行通信網絡,是一種全數字式現場控制設備互連總線,已成為一種國際標準(iso11898)。philips、intel、motorola等半導體廠商開發了支持can協議的集成器件,如82526、sja1000、68hc05x16等。由于can總線具有較強的糾錯能力,支持差分收發,因而適合高噪聲環境,并具有較遠的傳輸距離。因此,can總線對于許多領域的分布式測控系統很有吸引力,特別適合于基于單片機的小型分布式控制系統。目前已在工業自動化、機床、汽車等諸多領域得到廣泛應用。
can具有卓越的性能和高可靠性,通信介質可以是雙絞線、同軸電纜或光導纖維。can總線具有以下突出特點:
(1) 是一種多主總線,可以以多主方式工作,能使系統的各模塊實現多主通信,在多主方式工作下,網絡上任一節點均可在任意時刻主動向其他節點發送信息,不分主從,通信方式靈活;
(2) can網絡上的節點信息分為不同的優先級,可滿足不同的實時要求;
(3) 非破壞性的基于優先權的總線仲裁和錯誤界定;
(4) 通信距離可達10km(速率5kb/s),速率可達1mb/s(距離可達40m以內)。
can協議的最大特點是打破了傳統的節點地址編碼方式,而是對通信數據塊進行編碼,這種方法可使不同的節點同時接收到相同的數據,可定義211或229個不同的數據類型,網絡容量巨大。同時,避免發生總線“沖突”。
3 基于can總線的電動汽車能量管理系統
can通信網絡在國內燃油汽車中的應用研究已見諸有關文獻。我們提出的基于can總線的電動汽車能量管理系統如圖1所示,其中每個模塊都成為系統的一個can節點,可以相互通信。它由主控制器、電池管理模塊、電機驅動模塊、能量回收模塊、車況監控模塊組成。主要負責維持電動車所有的蓄電池組件工作處于最佳狀態;對電機進行監測和控制;對剎車時的瞬時能量進行回收;采集車輛的各子系統的運行數據,進行監控和診斷;控制充電方式和提供剩余能量顯示等。
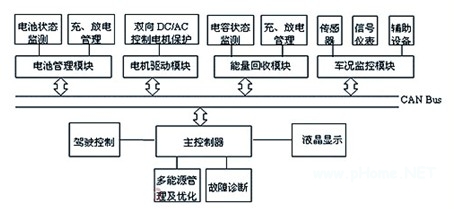
圖1 能量管理控制系統功能示意圖
4 基于can總線的dc-dc控制器的設計
4.1 能量回收模塊系統功能簡介
高水平的能量回收是電動汽車研究的一項重要課題。再生制動是將車輛的動能依靠電機的發電機儲存在電動汽車的儲能裝置中重新加以回收利用。我們提出了一種利用超級電容實現再生制動能量回收的方法。電動汽車目前由于蓄電池原因,一次充電續駛里程和運動特性還難以與燃油汽車相比。常多采用向蓄電池充電來吸收再生制動回饋的能量,其缺點是蓄電池難于實現短時間大功率充電且充放電循環次數有限,成本高。而超級電容具有比功率高、比重量大、一次儲能多等優特點,能大大提高電動汽車的一次續駛里程數并能在汽車啟動、加速和爬坡時有效改善電動汽車的運動特性。另外,使用超級電容后,動力電池的使用壽命亦可有較大延長,甚至可延長1.5倍。
在再生制動實驗中采用了國內生產的一臺永磁無刷直流電機(18kw/288v)和兩只超級電容(350v/0.7f/400a,400v /0.58f/400a),設計了一種能進行雙向升、降壓變換的小功率斬波器(dc/dc變換器)。 dc/dc變換器是超級電容和電機之間的一個周期性通斷的開關控制裝置,它的作用是通過其主回路的4個igbt管的開關占空比的改變來控制超級電容的充電或放電并提供給負載或超級電容要求的額定電壓。電動汽車在起動、加速和恒速運行時,超級電容放電,供給電機電能,電機處在電動狀態,實現電能到機械能的變換,驅動車輛前進。當電動汽車減速時,要求直流電機處在發電制動狀態,即處于再生制動狀態,給作為電源的儲能裝置超級電容充電,實現機械能到電能的轉換。
4.2 dc-dc控制器硬件系統設計
為實現上述控制要求,設計的dc-dc變換器的控制器硬件原理圖如圖2。
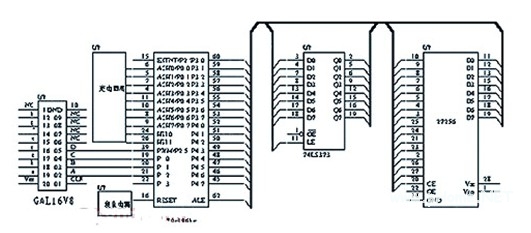
圖2 dc-dc控制器硬件原理圖
主要功能模塊有:
(1) 測量和控制模塊
cpu采用80c196kc單片機。電壓、電流信號經傳感器、信號調理電路整定至適合單片機a/d轉換器采集的信號。主要是對電動汽車的油門踏板、剎車踏板,主回路電壓、電流及超級電容的電壓、電流等信號進行測量及故障監測。
(2) 存儲信息模塊
擴展eprom32k×8位的紫外線擦除電可編程的只讀存儲器27256。
(3) 信號輸出模塊
本系統要求輸出四路pwm波形,控制主回路雙向升、降壓變換的六種控制模式。采用可編程邏輯器件gal16v8與80c196kc的pwm口直接連接,實現四路pwm輸出,分時控制主回路的四個igbt管的開關占空比,進行電壓調節。
(4) 通信接口模塊
控制器擴展的通信接口是can總線接口,can總線接口擴展采用can通信控制器sja1000+高速光耦6n137+can總線收發器 82c250電路,并可通過max232芯片與主計算機的rs232c串行口連接,實現主計算機與控制器的雙向通信,其電路原理圖如圖3所示。
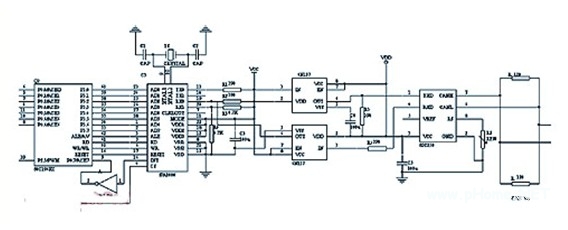
圖3 can總線接口電路原理圖
4.3 dc-dc控制器軟件系統設計
系統軟件的功能是對電動汽車的運行狀態進行判斷。若汽車加速踏板踩下,則超級電容工作在放電方式,調電動升、降壓子程序;若汽車剎車踏板踩下,則超級電容工作在充電方式,調制動升、降壓子程序。










評論