基于CAN總線的機車實時監控系統

1 引言
本文引用地址:http://www.j9360.com/article/201609/303363.htm傳統機車監控裝置通過轉存將機車運行過程中所記錄的數據轉存到地面二次開發平臺,在地面進行機車運行數據分析和故障診斷,這樣的檢測設備實時性不強,不能實時監測機車的運行狀態;隨著鐵路信息化數字化的發展,提出了機車在線實時監控以及機車檢修應向狀態修發展。近年來國內現場總線技術的成熟和不斷發展以及移動通信 gprs(通用分組無線業務general packet radioservice)的無線數據傳輸業務的成熟,使機車車輛的實時監測成為可能。為此,筆者根據自己實踐,介紹一種基于 can(controller area network)總線的機車實時監控系統。系統通過gprs的短信息業務,實現車載數據采集模塊與地面監控系統的實時通信,實現地面監控中心實時監控列車 運行狀態。
can總線是眾多現場總線標準之一,具有使用簡單、性能可靠以及系統可擴展性能好等優點。can總線有效支持分布式控制或實時控制的串行通信網絡,采用短 報文幀及gsma/cd-amp(帶有信息優先權及沖突檢測的載波監聽多路訪問)的mac(媒介訪問控制)方式,在工業自動控制化領域得到廣泛應用。特別適用于做優化、分析及維護的系統。90年代,國內開始對can總線應用進行研究,目前已在諸多領域中應用can總線技術。
2 基本原理
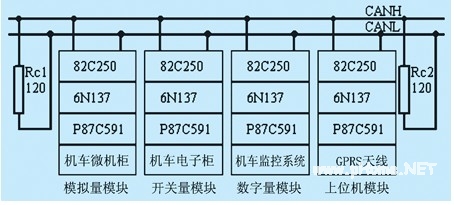
圖1 機車監控系統結構圖
圖1為機車實時監控系統結構圖。包括三個數據采集模塊、一個存貯發射模塊和地面監控系統(地面系統部分圖中未示)。數據采集模塊負責采集牽引電機電樞電 壓、電樞電流、勵磁電流等重要模擬量數據;各種風機接觸器的開閉狀態的開關量;機車基本信息(包括機車速度、機車位置、機車車號等)數字編碼量。存貯發射 模塊負責各數據采集模塊的協調工作,通過gprs將各采集的數據發送到地面監控系統。地面系統由pc機與gprs無線天線等模塊組成,通過gprs天線向 車載系統發送指令,指示車載模塊按地面要求進行工作。地面系統同時接收存貯發射模塊發送來的現場數據,數據按gprs的短信息業務格式發送接收。地面系統 軟件采用visual c++軟件編寫。軟件使用友好人機對話界面實時顯示、跟蹤、監控列車運行狀態,實現對機車實時在線故障檢測與診斷,機車出現故障時,還可以及時向司機提供操作建議,在機車庫檢時,系統還提供檢修指導,限于篇幅所限本文將重點介紹車載部分。
3 硬件結構設計
本系統是一個依照can2.0b構建的控制局域網(controller area network),總線控制器采用philips公司p87c591微控器內置的can控制器。p8xc591是一個單片8位高性能微控制器,具有片內 can控制器,采用強大的80c51指令集并成功的包括了半導體 sja1000 can控制器的pelican功能。can總線驅動器采用與sja1000 can控制器相匹配的pca82c250,下位機和上位機通過canh、canl屏蔽雙絞線進行雙向通信。總線終端需跨接100ω~120ω電阻以抑制信 號反射,保證通信可靠性。雙絞線連接各個模塊節點,形成多主控制的局域網。為增強can總線節點的抗干擾能力,p87c591的rxdc和txdc腳,通 過高速光耦6n173后與82c250相連,保證總線上各can節點間的電氣隔離,光耦部份電路所采用的兩個電源必須完全隔離。圖2為各節點和can總線 間的接口電路圖。
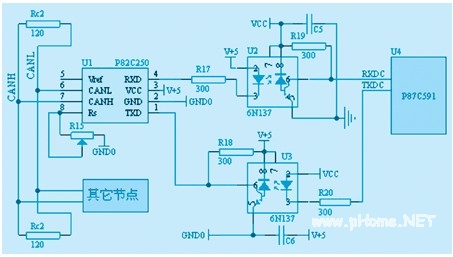
圖2 can總線接口電路圖
模擬量采集單元主要功能可以劃分為微處理器及其控制部分、can通訊接口部分、多路模擬量輸入通道選擇開關、模數轉換芯片等。模擬量直接由機車微機柜內引 入,信號在微機柜內已調理成適合a/d轉換的電平。模擬量信號的采樣和量化工作由一片ads774完成。ads774是美國burr-brown公司生產 的12位逐次逼近并行a/d轉換器,典型轉換時間為8.5μs。選擇mcp506a作為16路信號通道轉換開關,分時對16路模擬信號采樣及a/d轉換。
開關量采集單元采集的信號均來自機車電氣控制柜,采集板需采用光電隔離,增強抗干擾能力,實現與采樣電路的電氣隔離。系統采用兩片8255a擴展p0口以 對48路開關信號采樣,兩片8255a的a,b,c口設定為模式0和輸入方式。四個模塊結構基本相似,在此不一一綴述。
存貯發射模塊包括:閃存、帶斷電保護的時鐘芯片ds12887以及gprs天線組成。閃存具有斷電后保存數據特點,作為存放機車數據的黑匣子。gprs天 線和單片機通過rs-232相聯接,單片機通過讀寫串行口實現和中國移動網絡之間的數據接收和發送。用一片64kb的hm6264ram存儲有關控制信息 并作為與中國移動網絡和存貯發射模塊的數據交換區。
4 系統軟件設計
4.1 can初始化子程序
can控制器的初始化是系統設計工作中極為重要的部分,它是can總線正常工作的前提,關系整個車載系統能否正常工作,初始化工作既是一個重點,也是一個難點。can通信初始化包括操作模式的設置、驗收濾波器的設置、總線定時器的設置等。驗收濾波器的設置決定了節點所接收的信息的格式;定時器設置確定 can總線數據傳輸波特率。80c51cpu接口將pelican與p87c591微控制器內部總線相連,通過5個特殊功能寄存器canadr、 candat、canmod、cansta和cancon對pelican寄存器和ram區進行快捷的訪問。對can進行初始化實際就是對以上5個特殊功 能寄存器的進行讀寫訪問。以下是用c語言編寫的初始化子程序代碼。
void init_can(void)
{
canmod=0x01;
//將can控制器設置為復位模式以啟動初始化
p1m2=p1m2|0x02;
//p1m2.1=`1`,p1m1.1=`0`(默 認)
canadr=btr0;
//btr0和btr1編程為125kbit/s@12mhz
candat=0x45;
canadr=btr1;
//tseg1=12,tseg2=3,sjw=2
candat=0x2b;
//sample=1->sample point~81%
canadr=acr10;
//將地址設置到驗收代碼寄存器0(bank1)
candat=0x40; // 驗收濾波代碼
candat=0xe0; //驗收濾波代碼
canadr=amr10;










評論