基于CAN總線的電動汽車能量回收系統研究


圖4 主程序框圖
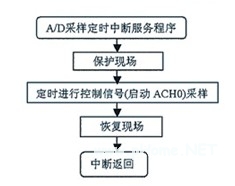
圖5 中斷服務程序框圖1
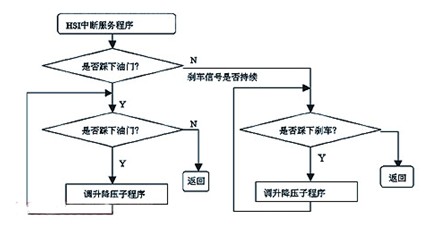
圖6 中斷服務程序框圖2
為了便于軟件的編寫和調試、控制算法的改變和分析使用,軟件采用了模塊化結構。系統軟件由主程序、子程序、中斷服務程序組成,圖4、5、6分別給出了主程序及2個中斷服務程序軟件框圖。
初始化中應設初始值及設定全局變量,初始化各中斷服務程序用到的中斷向量,并設置軟件結構,重置優先級順序。
a/d采樣中斷服務程序利用80c196kc的高速輸出器hso的cam鎖定位,定時啟動ach0通道。加減速中斷服務程序中使用了80c196kc的高速輸入器his記錄某一外部事件發生的時間,用于判斷加速、減速信號,這使得程序的編寫非常簡明。
5 結束語
本系統的軟硬件均采用了模塊化設計,通用性好、靈活性強,可作為開發平臺,便于擴展,是一個開放式的分布式控制系統,易于實現人機對話和遠程通信。
參考文獻
[1] 陽憲惠. 現場總線技術及其應用[m]. 北京:清華大學出版社,1999.
[2] 孫逢春. 電動汽車[m]. 北京:北京理工大學出版社,1997.
[3] 葛林等. can通信網絡在汽車中的應用研究[j].汽車技術,2000,(11).
[4] 王兆安. 電力電子技術[m]. 北京:機械工業出版社,2001.










評論