衛星姿控系統半物理仿真中轉臺控制算法的實現

摘要:衛星控制系統半物理仿真是在實驗室中模擬衛星在軌運動特性的試驗方法,主要用于驗證衛星控制系統方案和性能指標,是衛星控制系統研制中的一個重要環節。在衛星控制系統半物理仿真中三軸轉臺是一種重要的運動仿真器,針對以往轉臺控制算法復雜,軟件難實現運行時間長等問題,提出了一種簡單有效的三軸轉臺模擬衛星姿態運動控制算法,并給出具體的軟件實現過程,對于轉臺在仿真中的應用具有極大的借鑒和指導意義。
本文引用地址:http://www.j9360.com/article/201603/287503.htm引言
衛星控制系統半物理仿真試驗實際上是衛星動力學和運動學的仿真,由于要求硬件接入回路,它通常用于驗證衛星控制系統方案和性能指標,包括動力學仿真和運動學仿真。仿真計算機計算衛星的動力學和運動學方程,轉臺模擬衛星在空間的運動,目標模擬器模擬衛星姿態敏感期的參考目標的環境特性。本文主要研究轉臺系統接入仿真試驗過程中存在的問題:針對轉臺控制算法復雜,地速影響這兩個主要問題,本文給出了具體的轉臺控制算法,軟件實現簡單,執行效率極高,同時給出了地速補償方案及具體實現方式。本文所介紹的控制算法已成功應用于某衛星型號半物理仿真試驗中,文章的最后給出了試驗結果。

1 原理
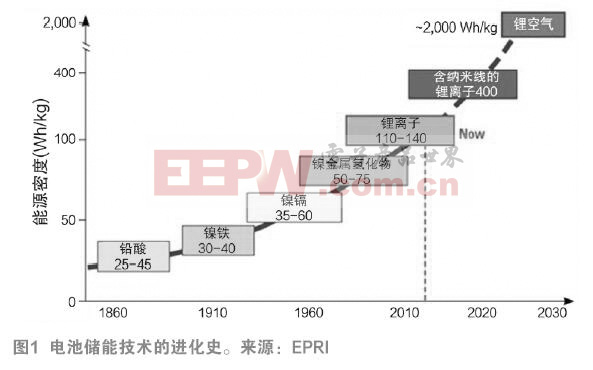
衛星控制系統半物理仿真比數學仿真具有更高的置信度,是衛星控制系統研制中的一個重要環節。當控制系統研制出來以后,人們最關心的問題是它的功能和性能是否與設計要求相一致,這只有通過對實際系統進行試驗才能確定。但是人造衛星控制系統不同于一般的地面設備,它必須在特定條件下才能實現閉路運行,并顯示其性能指標。半物理仿真是將參試的衛星控制系統各部件(包括硬件和軟件)接入仿真回路所進行的閉路動態試驗,它在地面設備(運動仿真器、目標仿真器、仿真計算機等)的配合下,模擬衛星在軌道上的各種運行狀態,達到驗證所設計的控制系統方案,檢驗系統實際性能的目的[1]。衛星控制系統半物理仿真系統構成框圖如圖1所示。

運動仿真器的主要功能是提供一種與衛星在軌道運行時相似或等價的運動,使衛星反饋控制試驗形成回路。

三軸伺服轉臺實際上是一個高性能的三軸伺服系統。在運行時,它要求每個軸嚴格地跟隨仿真計算機的某項輸出。一個三軸轉臺運動的效果是使在其內軸試驗臺上的儀器作繞轉臺轉動中心的姿態運動,轉臺的動態環節實際上是串接在整個試驗回路中的一個附加環節,理想情況下它的傳遞函數最好等于1,精度由轉臺機械臺體和控制系統(測角裝置、電路及控制計算機、馬達等)來保證。因此,它是一個名副其實的運動模擬器,不僅用于衛星姿態控制系統的半物理仿真,也廣泛用于其他運動物體的控制仿真(如飛機、導彈、魚類等)和某些專用儀器的性能測試(如陀螺)。某UUT轉臺實物如圖2所示。

2 轉臺控制鏈路
在衛星控制系統半物理仿真中,轉臺的控制鏈路如圖2所示。動力學仿真計算機將計算得到的星體慣性角速度(在星體系下的表示,本文所述物理量參考坐標系均為星體坐標系)通過網絡(或串口、反射內存等)發送給仿真器控制計算機,仿真器控制計算機從轉臺工控機獲取轉臺當前框架角信息,將星體慣性角速度轉換為轉臺框架角速度,并通過網絡(或串口、反射內存等)發送至轉臺工控機驅動轉臺框架轉動。

由轉臺控制鏈路可知,仿真器控制計算機內將星體慣性角速度轉換為轉臺框架角速度算法為轉臺應用的核心,也是轉臺應用的重點和難點,本文詳細介紹了一種實現簡單完成效率極高的控制算法及其詳細推導過程,易于工程實現。

3 轉臺控制算法
以UUT轉臺為例,設 分別為轉臺的內、中、外框架角,從轉臺工控機獲取,轉臺零位時,即內、中、外框軸正交,構成右手坐標系時,內、中、外框軸分別對應于星體坐標系的偏航軸Za、滾動軸Xa、俯仰軸Ya,定義該坐標為星體坐標系,該坐標系與轉臺固連。
分別為轉臺的內、中、外框架角,從轉臺工控機獲取,轉臺零位時,即內、中、外框軸正交,構成右手坐標系時,內、中、外框軸分別對應于星體坐標系的偏航軸Za、滾動軸Xa、俯仰軸Ya,定義該坐標為星體坐標系,該坐標系與轉臺固連。
陀螺在轉臺上的安裝方向參考陀螺坐標系與星體坐標間關系確定,轉臺控制的最終目的是使轉臺框架角速度在星體坐標系下的投影值與慣性角速度一致。
設繞轉臺內、中、外軸轉動的轉換矩陣如下:

則星體系下慣性角速度可以表示如下:
 (1)
(1)
得到轉臺框架角速度如下:
 (2)
(2)
 (3)
(3)
4 地速補償方法
由于仿真試驗在地面進行,陀螺輸出還包括了地球自轉的速度,這一附加輸出是衛星在軌運行時所沒有的,仿真試驗中應予以扣除。
首先將地速投影至轉臺零位坐標系,然后再投影到轉動坐標系(即星體系),設地速為we,λ為轉臺所在地的地理緯度,δ為北向逆時針轉到轉臺零位時Xa軸(中框軸)的角度,得到地速在星體坐標系下的表示如下:
 (4)
(4)
因此,考慮到扣除地速影響后,陀螺輸出慣性角速度的表示如下:
 (5)
(5)
經整理得到轉臺框架角速度如下,將此公式代入轉臺控制算法中,即可完成對于地速的補償:
 (6)
(6)
 (7)
(7)
5 關鍵技術
該算法有以下兩個突出的關鍵技術:
(1)轉臺控制算法:轉臺控制算法不同于常規的實現方式,該方法不存在矩陣求逆等復雜的矩陣運算、編寫軟件較容易實現、軟件運行時間短,從而極大地提高了仿真的實時性;
(2)地速補償算法:地球自轉對陀螺的影響與仿真試驗室在地球上所處的緯度以及安裝陀螺的運動模擬器所處的方位有關。地球自轉角速度比衛星的姿態穩定度大的多,在仿真試驗中,它將投影到每個陀螺的輸入軸上,成為一種附加干擾,必須加以補償,本文所介紹的地速補償方法,扣除地速影響后,大大提高了轉臺模擬衛星運動的準確度,能夠適用于高穩定度衛星的姿態運動仿真要求。


6 試驗結果分析
本文介紹的控制算法,已應用于上海航天控制技術研究所某衛星型號半物理仿真試驗,轉臺控制軟件界面如圖6所示,陀螺輸出衛星姿態角速度,動力學仿真輸出衛星姿態角速度等試驗曲線如圖7~圖10所示。可見,陀螺測量得到衛星姿態角速度與動力學仿真輸出一致,說明應用該控制算法,轉臺系統能夠精準模擬衛星的姿態運動。


7 結論
本文詳細介紹了轉臺在衛星控制系統半物理仿真中應用的具體實現方法,該方法具有軟件易實現、不存在矩陣求逆等矩陣運算、節省軟件運行時間、提高控制實時性的優點。另外,扣除地速影響后,大大提高了轉臺模擬衛星運動的準確度,能夠適用于高穩定度衛星的姿態運動仿真。目前該方法已經在多個衛星型號的半物理仿真中得到成功應用,對于其它環境下的半物理仿真應用也具有極大的借鑒意義。
參考文獻
[1]劉良棟,劉慎釗,孫承啟.衛星控制系統仿真技術[M].宇航出版社,2013.12
[2]章仁為.衛星姿態動力學與控制[M].北京航空航天大學出版社,1998
[3]劉慎釗.衛星控制系統仿真[M].系統仿真學報,1995
[4]劉慎釗.衛星控制系統多轉臺多模擬器半物理仿真方法[M].航天控制,2004.8
本文來源于中國科技期刊《電子產品世界》2016年第2期第61頁,歡迎您寫論文時引用,并注明出處。



評論