一種汽車電動式轉向器的電控系統設計

1 引言
車輛的轉向性能直接影響到整車的機動靈活性、操縱穩定性和使用經濟性。多軸轉向技術通過改變前橋以外的其它橋轉角,在低速轉彎時改善汽車的靈活性、機動性,在中高速時改善汽車的操縱穩定性。通過改變汽車瞬時出現的過多轉向或不足轉向,增強汽車的動態穩定性,使汽車行駛更安全,避免汽車由于過多轉向或不足轉向造成失控。
2 多軸轉向系統的實現原理
多軸轉向系統的轉向控制模式按其結構和執行機構的不同可分為機械式、液壓式和電子式等。目前多軸轉向裝置已將機械、液壓、電子、傳感器及微處理器控制技術緊密結合在一起。針對某三軸全路面起重機多橋轉向系統電控部分進行研究。由于系統的實時性較強,故采用了較為流行的CAN 總線控制方式。本文設計了一種高性能汽車電動式轉向器的電控系
統部分。
3 電控系統硬件設計
基于 CAN 總線的多軸轉向系統采用模塊化設計,主要由主控模塊和驅動控制模塊組成。主控模塊根據車輛的行駛姿態和多軸轉向控制策略(采用零側偏角比例控制策略)計算出各后橋的轉角值;驅動控制模塊則負責轉向執行過程的控制。多軸轉向主控模塊電控單元根據傳感器采集到的前輪轉角信號和車速信號,經過預定的控制策略進行處理計算,得到后橋最佳轉角值,同時將各橋轉角值發送到總線上。控制執行模塊的電控單元,經過辨認接收到各自的數據,經過PID 控制將轉角值轉化驅動比例電磁閥PWM 電壓信號,控制執行液壓缸活塞的位置,同時通過位移傳感器將實時的液壓缸位移值反饋給電控單元,使得后橋各轉過的角度具有一定的精確度,從而實現多軸轉向的目的。
3.1 多軸轉向電子控制系統的總體概述
本文所設計的多軸轉向電子控制系統主要由兩個模塊組成,每個模塊又由三部分組成:傳感器、電子控制單元(ECU)和執行機構。其設計主要包括傳感器與控制器的選擇、信號采集系統及其處理電路設計、CAN 控制與接收電路、執行機構及其驅動電路的設計。基于CAN總線多軸轉向電控系統硬件框圖如圖1。
3.2 傳感器的選擇
(1) 車速傳感器
霍爾車速傳感器是一種基于霍爾效應的磁電傳感器,具有對磁場敏感度高、輸出信號穩定、頻率響應高、抗電磁干擾能力強、結構簡單、使用方便等特點,從而得到廣泛的應用。其結構主要由齒圈、霍爾元件、永久磁鐵和電子線路等組成。其原理如下圖2 所示: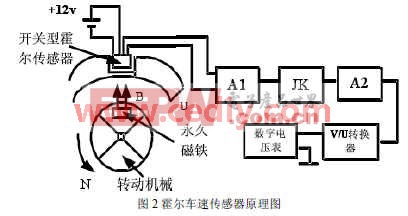
(2) 方向盤轉角傳感器
多軸轉向控制系統中,需要前輪轉角作為控制參數,由于前輪轉角值較難獲得,所以采用測量方向盤轉角值,通過運算得出前輪轉角值。
(3) 液壓缸位移傳感器
多軸轉向控制系統中要獲取后輪轉角值來判斷轉向是否到位,由于直接測量后輪轉角較為困難,而液壓缸的位置與后輪轉角一一對應,于是我們通過測量液壓缸位移間接測量后輪轉角,同時將轉角值反饋回ECU 中。本文采用變阻式位移傳感器。在微處理器的選擇方面, 我們力求吸收國內外成熟產品寶貴經驗,在進行了廣泛的電子產品市場調研后,在綜合性價比的基礎上,本系統選用了PHLIPS 公司生產的8 位P89C52 系列單片機作為微處理器。
3.3 CAN 總線系統節點硬件電路設計
基于 CAN 總線多軸轉向電控系統中CAN 總線節點的設計尤為重要。本文設計的CAN總線節點系統,采用P89C52 作為微處理器, 在CAN 通信接口中,CAN 通信控制器SJA1000,CAN 總線驅動器采用82C250。電路主要由四部分所構成:微控制器P89C52、獨立CAN 通信控制器、SJA1000CAN 總線收發器82C250 和高速光電耦合器6N137。微處理器P89C52 負責SJA1000 的初始化,通過控制SJA1000 實現數據的接收和發送等通信任務。






評論