CAN總線網絡測試研究

現場總線技術已成為當今工業自動化技術發展的熱點。CAN(Controller Area Network)即控制器局域網,是國際上應用最廣泛的現場總線之一。1991年9月,Philips Semiconductors公司制訂并發布了CAN技術規范(V2.0),該規范包括A、B兩部分。此后,1993年11月,ISO正式頒布了道路交通運載工具——數字信息交換——高速通信控制器局域網(CAN)國際標準ISO 11898。CAN是一種多主從方式的串行數據通信總線,傳輸速率高,抗電磁干擾性強,能檢測通信錯誤。作為一種技術先進、可靠性高、功能完善、成本合理的網絡通信控制方式已被廣泛應用到各個自動化領域,如汽車工業、工程機械、航空工業,被公認為幾種最有前途的現場總線之一[1]。
本文引用地址:http://www.j9360.com/article/194067.htmCAN總線網絡系統的開發是在網絡協議定義的框架下,對總線涉及的多個節點設備之間的數據交換的過程進行控制,涉及各個設備本身對數據交換的需求和響應,系統復雜,按照其功能可以劃分為:總體設計、節點設計和測試驗收。總體設計主要負責整個網絡功能定義,傳輸協議的設計、仿真,系統節點模型的建立和仿真,提出各節點的功能描述,包括節點電氣特性和功能特性,并交付各節點設計人員實現;節點設計則根據提出的節點功能描述進行網絡節點設備的開發,包括硬件設計和軟件開發,并協助其他開發人員完成對本節點設備的調試和測試。測試驗收根據網絡功能定義描述,制定網絡功能測試流程,建立網絡測試平臺,對各節點進行測試驗收和全網絡系統平臺實驗。
統一的開放式平臺使得CAN網絡設計人員和其他開發人員(如軟件工程師,測試工程師等)共享成果,減少了重復工作,加快了開發進度。此外,在節點設計之前,對整個網絡的協議和各節點功能進行全網絡仿真,可以在設計的最初階段發現和糾正設計中的錯誤或者疏漏;在硬件平臺搭建之前進行功能仿真,減少了節點設備開發階段由于軟件設計缺陷帶來的時間和資源的浪費;軟件仿真階段的成果可以直接用于對節點設備的測試檢查。在整個網絡系統實體構建完成前,通過CAN總線接口設備和殘余總線技術,對已經實現的節點進行實物仿真。
1 CAN總線節點組成和功能
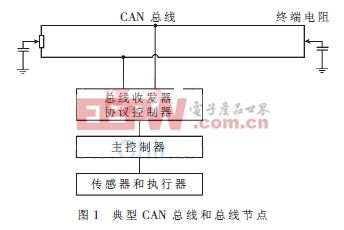
CAN總線節點位于傳感器和執行機構所在的工業現場,完成現場數據采集、控制和通信功能。典型CAN節點一般包括總線收發器和協議控制器、主控制器,以及傳感器和執行器,如圖1所示。CAN協議通信由總線收發器和總線控制器完成,協議控制器完成CAN協議數據鏈路層(MAC)的報文分幀、仲裁應答、錯誤檢測和標定,以及邏輯鏈路控制子層(LLC)的報文過濾、過載通知、恢復管理等具體服務;總線收發器完成CAN協議物理層功能,是CAN控制器和物理傳輸線路之間的接口。許多CAN節點采用了總線收發器(PCA82C250)、協議控制器(SJA1000)和主控制器(51系列單片機)方案,也有不少節點采用了內嵌協議控制器的微處理器(P8XC592/ARM)和數字信號處理器(TMS320F2407F)方案。
2 CAN總線測試平臺的組成
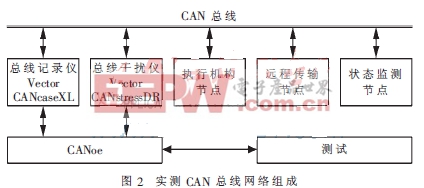
本文采用了Vector公司出品的CAN總線開發測試集成環境和工具構建了開放式開發測試平臺,對由3個節點組成的CAN總線通信網絡進行測試,優化總線參數,提高了CAN通信抗干擾能力。CAN總線測試網絡由執行機構節點、遠程傳輸節點、狀態監測節點組成。執行機構節點控制器采用TMS320F2407(內嵌CAN控制器),驅動執行機構完成相應功能,發送電機轉角編碼和瞬時轉矩電流信息報文;遠程傳輸節點是一個CAN/GPRS的網關,功能是將報文信息轉發至遠程節點。狀態監測節點則是一個基于PC和虛擬儀器(LabVIEW)的操作面板,轉換并顯示報文的物理量信息,同時控制執行機構的運行。
CAN總線測試環境和工具包括總線記錄儀、總線干擾儀和開發測試仿真環境[2-4]。總線記錄儀和總線干擾儀作為節點接入測試總線,如圖2所示。其中總線記錄儀(Vector CANcaseXL)接收、錄制、存儲和評估不同的CAN總線網絡信號和報文,記錄其工作狀態和故障情況,便于在隨后的回放中分析故障原因,提出優化改進的方法和措施;總線干擾儀(Vector CANStressDR)生成總線信號、總線物理屬性和邏輯電位的各種干擾,在實驗室環境下模擬實際工況中可能出現的斷路、短路,模擬不同長度的傳輸電纜,也可對報文特定位進行干擾以檢查總線的抗干擾能力;開發測試仿真環境(Vector CANoe)集成了總線開發和測試,通過定義報文數據庫,觀測報文數據并換算為相應的物理量顯示。通過仿真總線和實際總線的切換,不僅可以測試現場信號,還可對錄制的信號進行回放分析,分析查找故障原因。
3 CAN總線位定時參數的計算
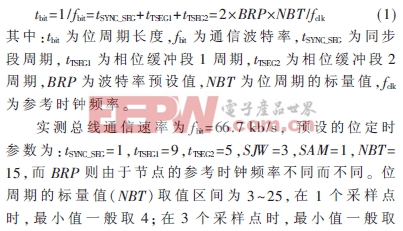
在CAN通信協議中,波特率、每個位周期的采樣位置和個數都可以自行設定,CAN總線上不同節點之間通過約定的通信速率進行通信,通過調整位定時參數可以優化網絡通信性能,例如,位周期內的采樣位置偏后,能容忍較大的信號傳輸延遲,即總線傳輸距離可以延長;取樣位置接近中間,則可以容忍CAN總線上節點間參考時鐘的誤差,顯然兩者是矛盾的,為了協調這種矛盾,必須對位定時參數進行優化設置。常用的通信速率有100 kb/s、125 kb/s、250 kb/s、500 kb/s和1 Mb/s等,對于常用的波特率,在一些CAN總線通信測試軟件中可以通過列表框進行選擇,對一些特殊的波特率,如本實測網絡采用了66.7 kb/s的通信速率,又或雖然是常用的波特率,但出于優化網絡通信性能的需要,選擇特定的位定時參數時,就要計算并通過總線時序寄存器設置位定時參數。
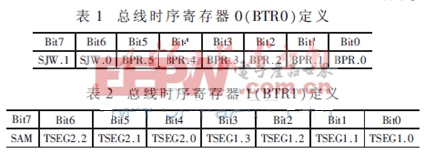
總線時序寄存器BTR0和BTR1定義如表1、表2所示。
位定時參數按式(1)計算[5-6]:
4 CAN總線網絡測試
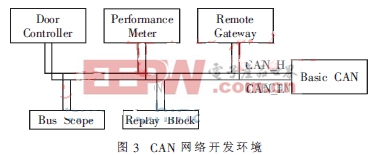
首先利用開發測試仿真環境(CANoe)定義CAN總線測試網絡,如圖3所示,其中Door Controller表示執行機構節點,Performance Meter代表狀態監測節點,Remote Gateway代表遠程傳輸節點;系統則自動生成Basic CAN代表總線,以及Bus Scope總線記錄儀和Replay Block總線回放“虛擬”節點。采用CANcaseXL記錄運轉過程中總線上的報文信息和總線負載,并在CANoe環境下進行回放、分析,如圖4所示。

CAN總線在不同的應用場合,其總線長度、總線負載、終端電阻、環境各不相同,導致無法針對實際工況進行優化,提高數據通信的可靠性。利用本文所述的測試工具和平臺,可以對現場工況進行記錄回放,或在實驗室進行模擬測試,幫助開發人員和測試人員盡可能準確地定位故障,從而提高開發的效率。本文的模擬測試結果表明,電氣和參數對CAN總線上通信性能影響較大,通過測試工具模擬發現,終端電阻對提高通信質量,降低報文差錯影響較大。通過測試工具分別模擬了CAN總線短路、75 Ω、120 Ω、開路等終端電阻,通信過程中正確幀和錯誤幀速率測試數據如表3所示,可以看出終端電阻為120 Ω時通信差錯率最小。

參考文獻
[1] 鄔寬明.CAN總線原理和應用系統設計[M]. 北京: 北京航空航天大學出版社,1996.
[2] Vector Informatic GmbH.CANoe User manual, Version 4.1[S].
[3] Vector Informatic GmbH.CANcaseXL/log, Version 3.0[S], User Manual.
[4] Vector Informatic GmbH. CANStress Manual, Version 2.1[S].
[5] PHILIPS.Determination of bit timing parameters for the CAN Controller SJA1000[S], 1997.
[6] 吳永.CAN總線位定時參數的確定[J].單片機與嵌入式系統應用,2003(10):19-22.






評論