基于時差法的液壓系統流量檢測方法研究

3.1 CPLD功能模塊
CPLD功能模塊主要由6個子模塊組成,如圖2所示。它們都是利用VHDL語言編寫,各自的功能:DECODER子模塊是將單片機的指令經過解碼傳輸給CPLD內部各個子模塊;CNT子模塊負責計時;PULSE子模塊產生驅動脈沖:CNT_SP子模塊產生CNT的停止計時信號;SEL_2用于選取將CNT中的16位數據的前8位和后8位;TRIBUFFER可將SEL_2選擇的8位數據傳輸給單片機。本文引用地址:http://www.j9360.com/article/192127.htm
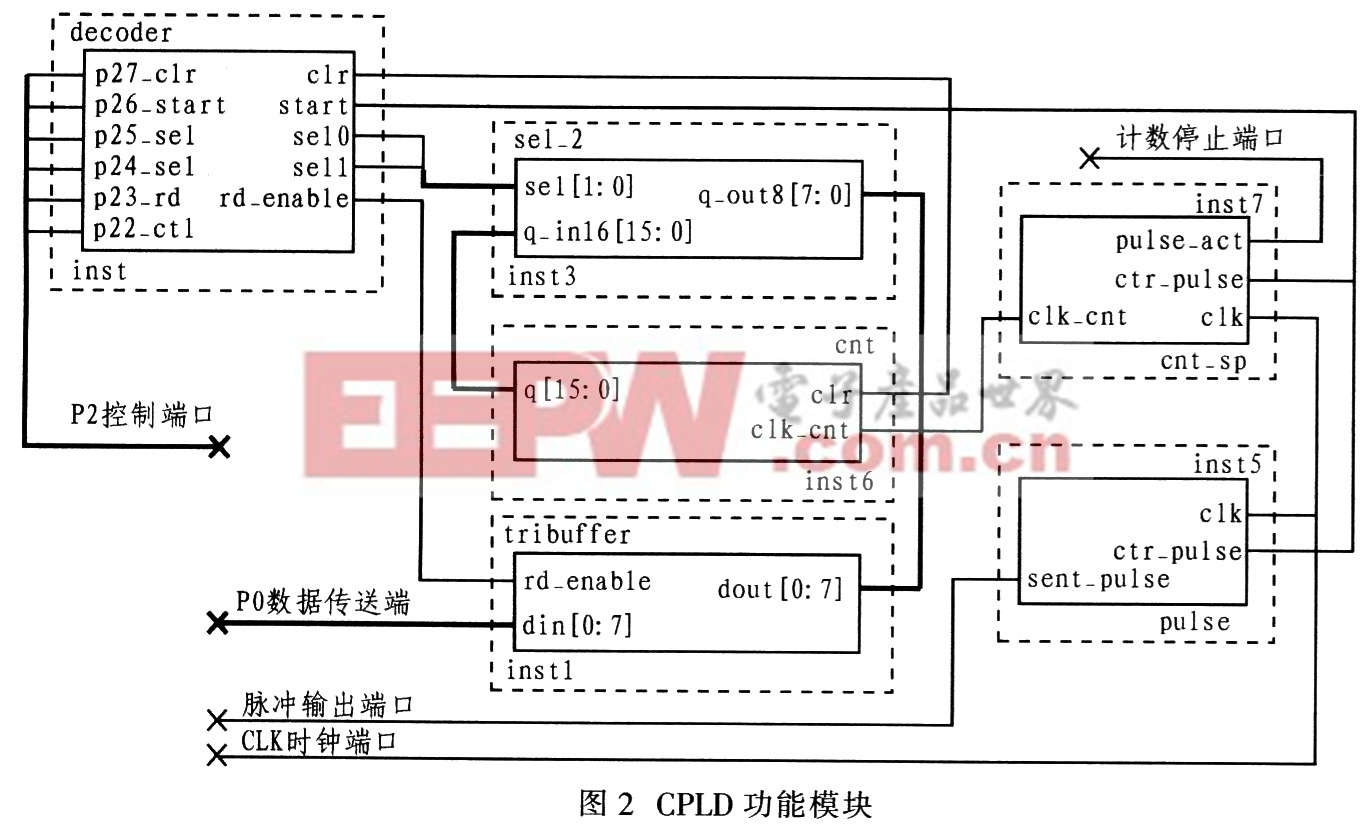
其工作流程如下:通過單片機的P2端口使CPLD工作.由PULSE子模塊發送特定脈沖信號驅動超聲波換能器,CPLD在發射脈沖的同時CNT子模塊開始計時,接收放大電路接收信號并經過零比較后,向CPLD的PULSE_ACT口提供停止計時的高電平信號。然后CPLD就將CNT中計時的16位數據以8位的形式通過SEL_2,TRIBUFFER再通過P0口上傳給單片機.由單片機實現數據處理,最后上傳或直接顯示數據目。
3.2 CPLD中關鍵子模塊的功能仿真
由于檢測系統要求準確的驅動脈沖和精確的順逆流時間,所以PULSE和CNT兩個子模塊成為設計的關鍵模塊。這2個模塊的設計好壞直接影響著整個系統性能,功能仿真和驗證設計的可行性。
3.2.1 PULSE子模塊仿真
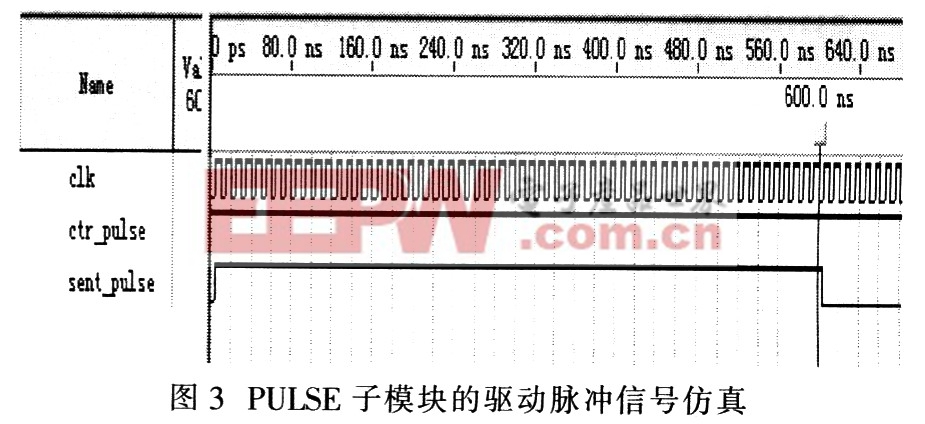
根據頻譜分析,驅動脈沖寬度與傳感器頻率之間存在最佳關系式,當脈沖寬度滿足該關系式時,接收傳感器的接收信號質量最佳。由于該設計采用2.5 MHz的超聲換能器,經計算驅動脈沖最佳為600 ns。由于CPLD控制信號可以達到納秒級的控制精度。因此可產生控制信號,既克服了模擬器件抗干擾性差的缺點,又解決了單片機信號精度差的問題。CPLD產生控制信號再經光電隔離進入驅動電路。從而控制150 V高壓驅動超聲發射傳感器,驅動信號采用單脈沖驅動,如圖3所示,EMP240T100C5N用100 MHz時鐘晶體振蕩器發送600 ns驅動脈沖信號。
3.2.2 CNT子模塊仿真
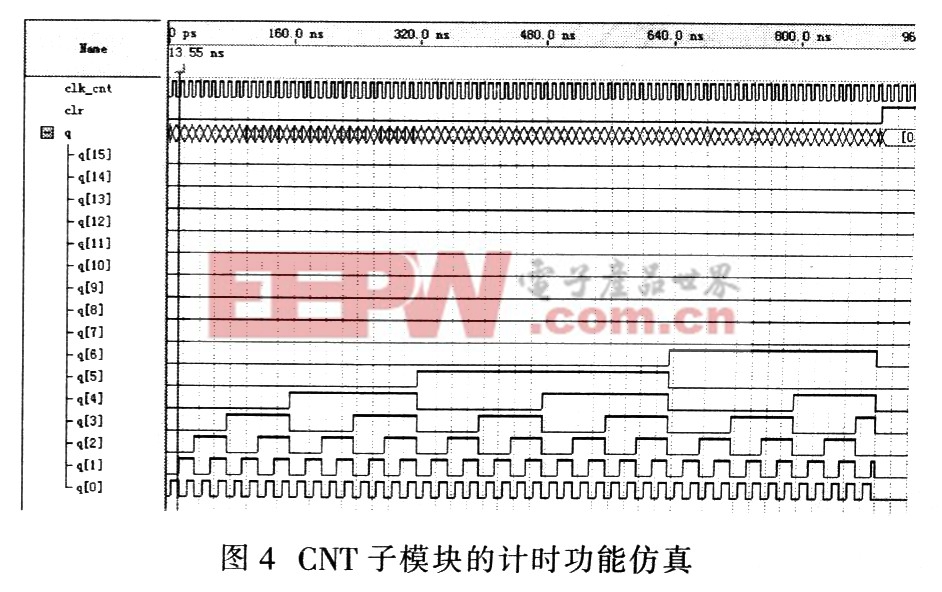
超聲波測流量系統的關鍵技術是對超聲波在順流和逆流這兩種情況下的準確的計時。計時越精確所得時間差越準確,有利于后續流速和流量的計算。由于超聲波的頻率為2.5 MHz,所以需要計時器的工作頻率與之相適應。該系統設計的CPLD采用100 MHz的有源晶體振蕩器,時鐘周期達到10 ns。計時原理為:當CPLD從開始發送脈沖信號時開始計數,當接收到脈沖信號時停止計數。通過換算,將CPLD所計的數值換算成超聲波在液體中所用時間,從而實現計時功能,如圖4所示。
4 結語
通過對關鍵子系統的功能仿真,可以看出CPLD關鍵子系統的設計滿足整體設計的性能要求。在實際應用中CPLD也可以滿足其設計要求。該超聲波液壓流量檢測系統具有精度高,反應快,抗干擾能力強的功能.適用于較惡劣的環境,同時也便于診斷液壓系統故障。




評論