基于FPGA的Kalman濾波器的設計

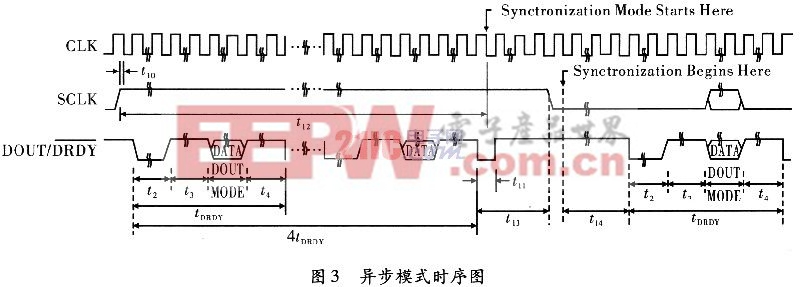
輸出有3種模式:同步、異步及掉電模式,異步模式與Kalman濾波器數據輸入接口連接比較方便。其時序如圖3所示。本文引用地址:http://www.j9360.com/article/191740.htm
2.2 FPGA設計
FPGA的特點在于靈活,通用。如果資源夠用,可以實現各種數字組合,包括CPU。本系統采用的:FPGA是Ahera公司低價位的EP1C12,該芯片內含有兩個PLLs,12060LEs及239616 Total RAMbits。在本系統的設計中,FPGA內主要實現以下幾個功能:Kalman狀態控制信號、Kalm-an濾波運算、A/D控制模塊、時鐘及波特率設置等。卡爾曼濾波器的系統結構圖,如圖4所示。
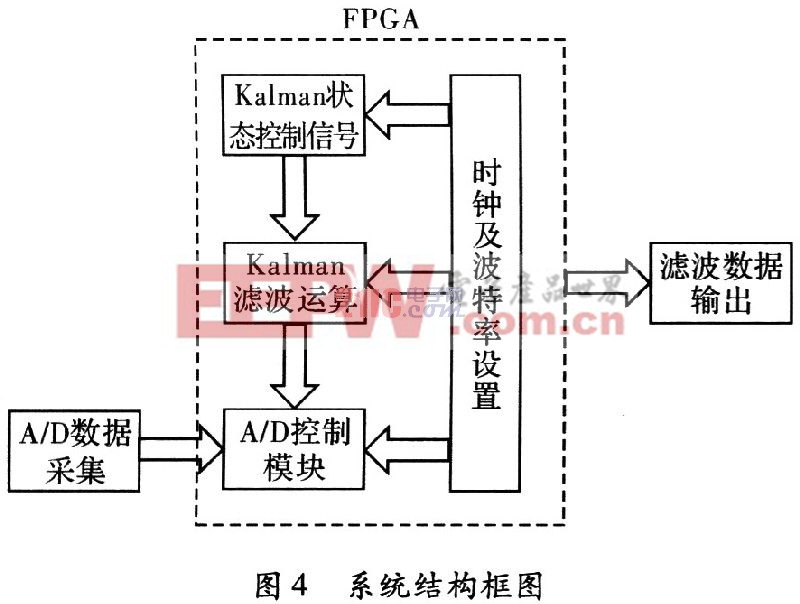
通過A/D轉換芯片采集轉換數據后,進入FPGA的A/D控制模塊,在Kalman狀態控制信號的作用下,進行濾波運算,然后通過控制接口將濾波數據輸出。由此可見,卡爾曼濾波的實現包括兩部分:Kalman狀態控制信號和Kalman濾波運算。
3 Kalmaft濾波器的設計
在FPGA中實現Kalman濾波器,重點在于平衡資源利用率和處理速度、數據運算精度之間的矛盾,難點在于浮點加、減、乘、除的硬邏輯及卡爾曼濾波流程控制的實現。一般地,實際應用中,數字采樣重復頻率是待采樣信號最高頻率成分的5倍以上能保證較好恢復原信號,本設計中出于后期升級的考慮,將采樣率設置在800次/s,是輸出信號帶寬的20倍。
通過第2節中的分解,Kalman濾波器由16次加法、20次乘法、1次除法以及必要的輸入、輸出及循環控制組成,共45步。狀態控制器(Kal-man狀態控制信號)實際是一個有限狀態機,分別控制濾波器中的45步運算,決定其執行順序,每一步利用計數器為其提供必要的時鐘周期。
Kalman濾波運算主要是浮點計算,浮點表示常用的標準是IEEE 754,IEEE二進制浮點數算術標準(IEEE754)是最廣泛使用的浮點數運算標準,為許多CPU與浮點運算器所采用。IEEE 754規定了4種表示浮點數值的方式:單精確度(32位元)、雙精確度(64位元)、延伸單精確度(43位元以上,較少使用)與延伸雙精確度(79位元以上,通常以80位元實做)。
二進制浮點數是以符號數值表示法格式儲存,將最高效位元指定為符號位元(Sign Bit);“指數部分”,即次高效的e位元,為浮點數中經指數偏差(Exponent Bias)處理過后的指數;“小數部分”,即剩下的f位元,為有效位數(Significand)減掉有效位數本身的最高效位元,如圖5所示。
文中采用的單精度二進制小數,使用32個位元存儲,如圖6所示。
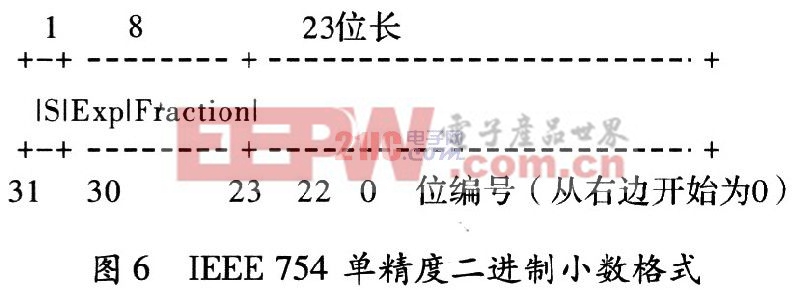
其中,31位是符號位;0表示正;1表示負;30~23位為階數;22~0表示數值的有效位。偏正值為+127。其表示的具體值可用式(27)表示

指數部分采用一個無符號的正數值存儲。單精度的指數部分是-126~+127加上127,指數值的大小為1~254(0和255是特殊值)。浮點小數計算時,指數值減去偏正值將是實際的指數大小。









評論