可編程控制器在船舶減搖鰭隨動系統中應用

減搖鰭是最為行之有效的一種主動式船舶減搖裝置,它的減搖效率高,經過60多年的發展,已廣泛應用于各種船舶中。它的減搖原理是:船舶在水中行駛過程中,當鰭在水中有一個速度和傾斜角的時候,就會產生一個升力,利用此升力產生的力矩來抵抗海浪的干擾力矩,便可達到減小船舶橫搖的目的。隨著科學技術的發展,減搖鰭系統正在逐步完善,減搖效果也在不斷提高。
本文引用地址:http://www.j9360.com/article/189784.htm近年來,在工業生產的自動化控制領域中,正普遍利用一種新型控制設備--可編程控制器(PLC)。目前的PLC正在向著精度更高、功能更多、使用更方便的方向發展。從PLC的發展趨勢來看,PLC控制技術將成為今后工業自動化的主要手段。將其引入減搖鰭控制系統中,實現數字化控制,將進一步提高控制系統的靈活性和可靠性。
1 減搖鰭隨動系統的構成及工作原理
減搖鰭的隨動系統連接來自控制系統的控制信號,是轉鰭機構的中間轉換和功率放大環節。改造前,每個隨動系統由±15V穩壓電源板DYCJ、綜合放大板SKCJ、操縱轉換板SCCJ、液壓控制系統以用轉鰭機構、反饋、限位元件等組成。隨動系統應盡可能快速、準確、穩定地工作。目前,大多數減搖鰭的隨動系統都是電-液隨動系統。本系統以NJ4型減搖鰭的閥控式電液隨動系統為原型,對其做了適當的改進,下面進行詳細介紹。
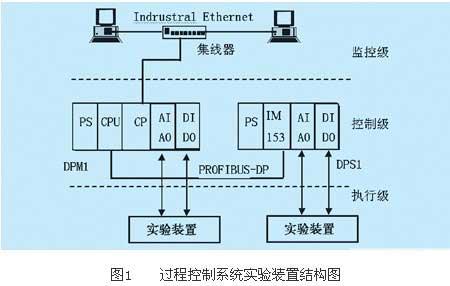
原有隨動系統的工作原理圖如圖1所示。首先將來自控制器的信號送到綜合放大電路板SKCJ(該插件板能對控制信號進行隔離),與升力反饋信號進行代數求和、校正、放大,然后再與鰭角反饋信號進行二次代數求和、校正、放大,接著送到鰭機械組合體上的射流管電液伺服閥,進行電-液信號轉換。電液伺服閥根據SKCJ板輸出信號的大小和極性調節來自油源機組的液壓油的流量和流向,使液壓缸的活塞速度和運動方向發生變化,帶動鰭機械組合體上的搖臂轉動,使鰭轉動到一定的角度產生相應的對抗力矩。

改造后,以上各功能完全由PLC實現,原有隨動系統中的各電源、插件板也將由PLC各模塊取代。
2 隨動系統的改造
2.1 減搖鰭隨動系統的改造設計
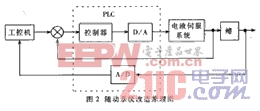
PLC隨動系統接收來自控制器的控制信號,經過處理后傳遞給伺服系統,驅動減搖鰭移動到指定位置,同時將輸出信號反饋回PLC,構成控制回路。系統改造后的原理如圖2所示。
2.2 系統中PLC的選擇
由于船舶航行在環境瞬息萬變的海面上,工作環境非常惡劣,比如機艙內的溫度能夠達到55℃,濕度更可以達到95%,并且存在各種強烈的沖擊、振動和鹽霧,這就要求安裝在艦船上的減搖鰭系統有較強的抗干擾能力。而船舶上空間狹小,對所安裝設備的體積也有一定的要求。由于減搖鰭隨動系統工作環境的特殊性,對系統中的PLC有較高的要求。考慮到性能指標、功能、體積和價格等因素,本文選擇了松下電工的FP0系列可編程控制器。 系統主要包括電源單元、控制單元和兩個模擬量輸入輸出單元。PLC工作環境溫度在0~55℃范圍內,工作環境相對濕度為30%~85%,模擬輸入與PLC內部電路之間采用光電耦合器進行隔離,同時輸入輸出端設置濾波器,使之符合減搖鰭系統工作環境的要求。
傾角傳感器相關文章:傾角傳感器原理







評論