氣動發動機的電控系統設計

摘要:文章介紹了基于ATmega16的氣動發動機電控系統設計,經試驗證明該電控系統可以實現對氣動發動機的有效控制。文章設計了信號采集處理模塊、電磁閥驅動模塊和CAN通訊模塊等的硬件電路,采用模塊化方式的控制軟件設計,并建立了基于CAN總線的網絡通信平臺以便系統擴展,還提出了完善電控系統的建議。
關鍵詞:氣動發動機;電磁閥;電控系統;CAN總線;ATmega16
0 引言
隨著環境污染、能源危機等全球性問題的日益突出,代用燃料汽車、電動汽車和混合動力汽車等低排放、節能經濟型的汽車相繼涌現。它們有各自突出的優點,但同時也有相應的局限。而壓縮空氣動力汽車(Air-powered Vehicle)是利用高壓壓縮空氣在發動機氣缸內膨脹做功,推動活塞做功對外輸出動力,驅動汽車行駛。不僅壓縮空氣來源方便,而且它還具有結構簡單、造價低廉、清潔環保等眾多優點;可以實現零排放,是真正的環保汽車。
本課題將LF162MK改裝成由電控系統控制電磁閥噴射壓縮空氣的氣動發動機。本文進行了基于ATmcga16的氣動發動機電控系統設計,該電控系統具有靈活、快速和準確等優點,能夠實現對氣動發動機各傳感器的實時測量和對執行器的控制以及PC機上的實時監控。
1 氣動發動機電控系統設計總體方案
氣動發動機電控系統設計包括硬件設計和軟件設計兩部分,系統主要完成以下任務:實時采集發動機狀態參數:實現對特征參數快速精確的計算;實時控制電磁閥噴氣定時和噴氣量;實現數據實時通訊。
氣動發動機電控系統的設計要從系統檢測和控制功能的需求出發,按以下要求進行設計:選擇適當的信號采集方式,選用合理的傳感器,準確地反映發動機各狀態參數;選用合適的控制芯片,采用低功耗高性能的元器件,簡化電路,提高控制精度;采用模塊化設計方法;系統具有抗振動和抗干擾性能;驅動模塊具有良好的可靠性和負載能力;適應車載發動機實際工作環境。
2 氣動發動機電控單元硬件設計
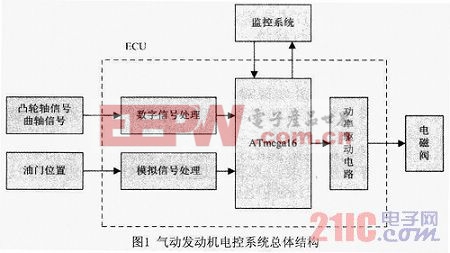
電控單元(ECU)是整個氣動發動機電控系統的核心。它由微控制系統模塊、輸入信號處理模塊、功率輸出執行模塊和通訊模塊等部分組成。ECU要完成的主要任務有:實時處理傳感器采集的數據,并將采集的數據經A/D轉換、濾波和整形放大,轉換成單片機可以讀取的標準信號;通過數學計算和邏輯判斷制定出控制命令驅動執行器(高速電磁閥)工作,實現對噴氣定時、噴氣量的準確控制;實現CAN總線實時通訊任務,從而使發動機保持最佳運行狀態。氣動發動機電控系統總體結構如圖1所示,包括ATmega16、信號處理電路、功率驅動電路、通訊電路及
傳感器和執行器等,分別完成對氣動發動機的實時檢測、控制和監測的功能。
2.1 電控系統的核心微處理器
氣動發動機電控系統具有多控制參數、控制算法復雜及實時控制等特點。ECU作為整個電控系統的核心,它不但要對發動機各數據信號采集和實時控制,還要處理各信號之間的關系以及噴氣定時和噴氣量的計算。另外,氣動發動機電控系統的工作環境惡劣,要承受強烈的振動和強電磁干擾等。本課題選用ATMEL公司開發的ATmega16作為主芯片,它是一款低能耗、低電壓、高性能的AVR系列微處理器。它具有強大的數據處理功能、豐富的外圍接口和模塊化的功能設計,完全可以滿足氣動發動機電控系統數據采集、處理、控制和通訊的需求。

評論