一種24V直流電機驅動器設計

電動機分為交流電機和直流電機兩大類。長期以來,直流電機以其良好的線性特性、優異的控制性能、較強的過載能力成為大多數變速運動控制和閉環位置伺服控制系統的最佳選擇,一直處在調速領域主導地位。傳統的直流電機調速方法很多,如調壓調速、弱磁調速等,它們存在著調速響應慢、精度差、調速裝置復雜等缺點。隨著全控式電力電子器件技術的發展, 以大功率晶體管作為開關器件的直流脈寬調制(PWM)調速系統已成為直流調速系統的主要發展方向。
本文引用地址:http://www.j9360.com/article/178737.htm為配套24V直流電機,設計了一種直流無刷電機驅動器。采用美國Microchip公司的PIC16F690單片機作為控制器, MOSFET為驅動元件, 配以相應的控制軟件構成控制系統。實踐表明,整個系統的精度、快速性以及可靠性等指標都能滿足實際需求。
1 PWM 直流調速原理
在PWM 調速系統中,一般可以采用定寬調頻、調寬調頻、定頻調寬3 種方法改變控制脈沖的占空比,但是前兩種方法在調速時改變了控制脈寬的周期,從而引起控制脈沖頻率的改變, 當該頻率與系統的固有頻率接近時將會引起振蕩。為避免之,設計采用定頻調寬改變占空比的方法來調節直流電動機電樞兩端電壓。
定頻調寬法的基本原理是按一個固定頻率來接通和斷開電源,并根據需要改變一個周期內接通和斷開的時間比(占空比)來改變直流電機電樞上電壓的占空比,從而改變平均電壓,控制電機的轉速。在PWM 調速系統中,當電機通電時其速度增加,電機斷電時其速度減低。只要按照一定的規律改變通、斷電的時間,即可控制電機轉速。而且采用PWM 技術構成的無級調速系統,啟停時對直流系統無沖擊, 并且具有啟動功耗小、運行穩定的優點。為了說明問題,現假定電機始終接通電源時,電機最大轉速為Vmax, 占空比為D = t /T, 則電機的平均速度Vd = D*Vmax, 由公式可知,當改變占空比D = t /T 時,就可以得到不同的電機平均速度Vd,從而達到調速的目的。
在一般應用中,可將平均速度與占空比D 近似地看成線性關系。
2 系統硬件設計
2.1 總體設計原理
系統要求電機能夠按照設定值運轉,并能實現正反轉控制,根據直流電機的PWM 控制要求,控制系統的硬件部分主要包括單片機控制電路、光電隔離電路、驅動電路等幾個部分,系統的硬件原理框圖,如圖1所示。控制信號送入PIC 單片機模擬口,經過處理后,輸出PWM控制脈沖,為了提高系統的抗干擾性,在單片機控制電路和電機驅動電路之間用光電耦合器( TLP521) 實現電氣隔離, 隔離后的控制信號經電機驅動邏輯電路產生電機邏輯控制信號, 分別控制H橋的上下臂,從而實現電機的正反轉和調速的目的, 同時電機的轉速能通過編碼器反饋給單片機, 實現速度的閉環控制。
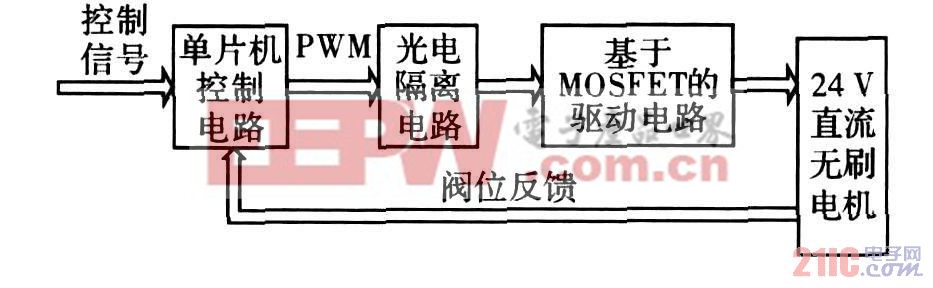
圖1 控制系統原理框圖








評論