基于DSP+CPLD的伺服控制卡的設計

0 引 言
隨著先進制造技術的迅速發展,對運動控制的精度要求也越來越高,而運動伺服控制系統的性能很大程度上取決于伺服控制算法,通過運動控制與智能控制的融合,從改進傳統的PID控制,到現代的最優控制、自適應控制、智能控制技術,應用先進的智能控制策略達到高質量的運動控制效果,已經成為當前研究的一個熱點。
由于運動伺服控制系統中存在負載模型參數的變化,機械摩擦、電機飽和等非線性因素,造成受控對象的非線性和模型不確定性,使得需要依靠精確的數學模型,系統模型參數的常規PID控制很難獲得超高精度、快響應的運動軌跡的要求。因此伺服控制系統越來越多采用PID與其他新型控制算法相結合的控制方式,如人工智能與專家系統、模糊控制、人工神經網絡、遺傳算法等,這里設計了一種基于神經網絡控制算法的運動伺服控制卡,采用DSP+CPLD的硬件平臺,采用單神經元PID與CMAC并行控制的伺服控制算法,通過對伺服電機的控制實現對位置的閉環控制。仿真和實踐結果證明,這種運動控制算法有魯棒性和抗干擾能力。
1 硬件設計
該運動控制卡是以PC機作為主機的運動控制卡,選用DSP作為核心微處理器,卡上集成編碼器信號采集和處理電路,D/A輸出電路,擴展存儲器電路和DSP―PC通信電路。PC機把粗處理的數據通過DSP一PC通信接口傳遞給運動控制系統,DSP通過對光電編碼器反饋信號處理電路的結果分析,計算出與給定位置的誤差值,再通過軟件位置調節器獲得位置控制量,計算出運動速度控制量,產生的輸出信號經D/A轉換將模擬電壓量送給伺服放大器,通過對伺服電機的控制實現對位置的閉環控制。系統的結構框圖如圖1所示。
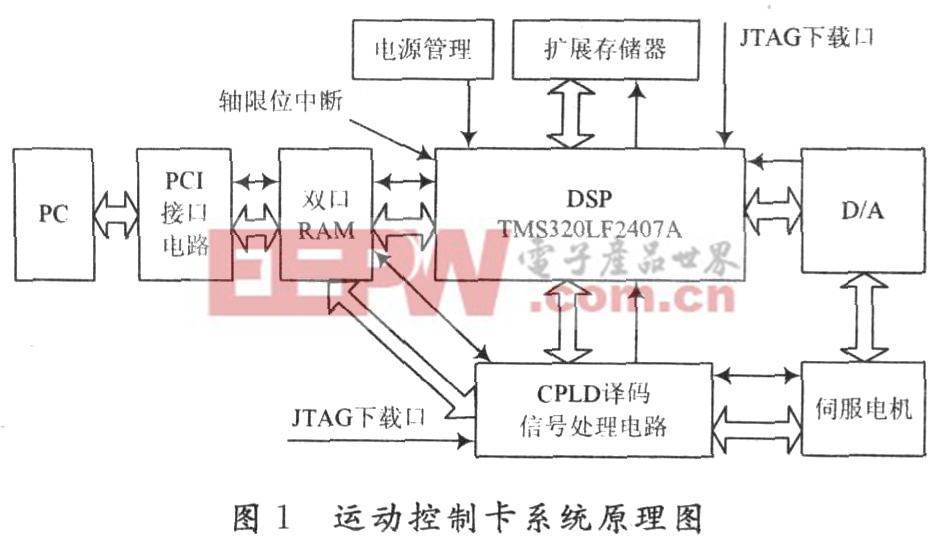
選用美國TI公司的16位定點DSPTMS320LF2407A作為運動控制器的核心處理器,地址譯碼、時序邏輯、編碼器信號處理電路用CPLD來完成,用PCI接口芯片實現雙口RAM與PC機的通信,雙口RAM用來存儲和緩沖DSP與PC機間的通信數據,SRAM用來存儲運動控制器運行時的程序和數據。

伺服電機相關文章:伺服電機工作原理










評論