小型無人靶機掠海定高飛行控制系統(tǒng)設計與實現(xiàn)

0 引 言
靶機是無人機家族中的一個重要分支,主要用于模擬作戰(zhàn)飛機、導彈等威脅目標,為防空武器系統(tǒng)試驗和訓練提供逼真的空中靶標。隨著技術的進步,現(xiàn)代反艦導彈多采取“超低空掠海”飛行的突防方式,與之相應的用于模擬反艦導彈類目標的無人靶機也需要具有超低空掠海飛行能力。20世紀60年代,以美國為代表的西方發(fā)達國家推出了第一代具有超低空掠海定高飛行能力的靶機,之后迅速形成了系列化,并隨著新技術的應用不斷升級換代,某些經典型號至今仍在廣泛使用,如石雞、火蜂、米拉奇等系列靶機,其掠海飛行的相對高度均達到了5 m以下。國內在這一領域則起步較晚。飛行控制系統(tǒng)是無人機的“大腦”,無人機的超低空掠海飛行主要是在飛控系統(tǒng)高度控制器的控制下實現(xiàn)的。因此,本文針對小型靶機飛控系統(tǒng)的研制,基于無線電高度表/加速度計組合控制的基本原理,采用Kalman濾波信號處理方法和基于ARM7微處理器的嵌入式系統(tǒng),設計了一種簡單實用的高度控制器,能夠對靶機飛行高度進行精確控制,從而實現(xiàn)超低空掠海定高飛行的目的。
1 飛控系統(tǒng)配置與高度控制原理
靶機飛控系統(tǒng)由傳感器、飛控計算機和執(zhí)行機構3個部分組成。傳感器主要包括垂直陀螺、兩軸角速率陀螺、三軸捷聯(lián)式磁航向傳感器、無線電高度表、垂向加速度計、空速管、GPS接收機、發(fā)動機溫度和轉速傳感器等;飛控計算機是飛控系統(tǒng)的核心部件,是一臺基于ARM7的嵌入式計算機,接收來自各傳感器的測量信息,并根據(jù)控制律進行解算,給出控制信號驅動執(zhí)行機構動作;執(zhí)行機構主要包括升降舵機、副翼舵機、舵回路控制器、發(fā)動機油門電機和ECU控制器。飛控系統(tǒng)組成如圖1所示。
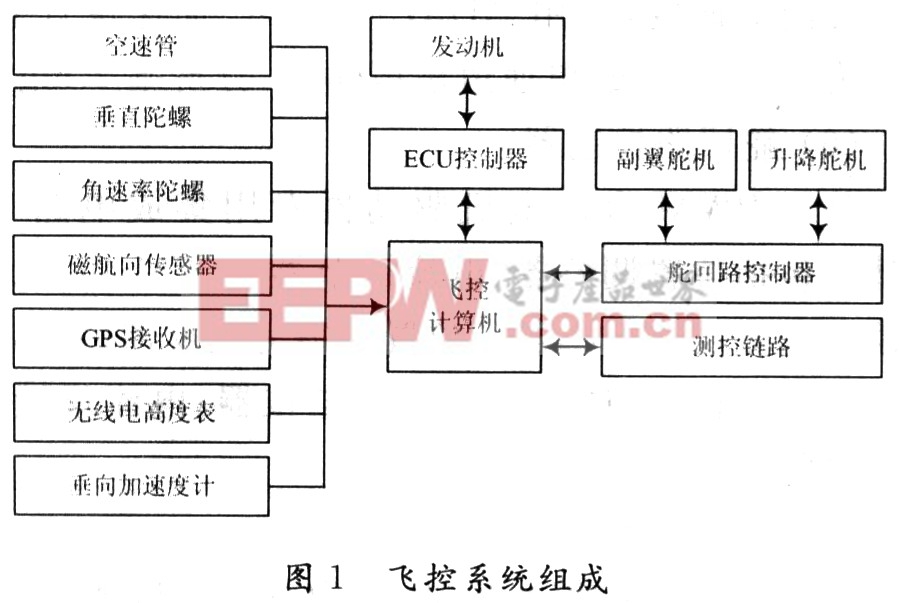
高度控制器主要由內、外兩個反饋控制回路構成。首先是以垂直陀螺和角速率陀螺測量信號作為反饋控制信號構成靶機姿態(tài)控制內回路(角運動控制系統(tǒng)),包括橫向、縱向兩個控制通道,是系統(tǒng)的核心控制回路。由于姿態(tài)控制系統(tǒng)在常值干擾力矩(如垂風)的干擾下存在姿態(tài)角靜差,會導致高度漂移,不能直接應用于高度軌跡的穩(wěn)定與控制,因此在高度控制系統(tǒng)中需要直接測量飛機高度和垂向運動速度等線運動信息,使用高度表和線加速度計等傳感器,在姿態(tài)控制系統(tǒng)基礎上建立高度控制外回路,兩者共同構成完整的高度控制系統(tǒng)(圖1中陰影部分)。在超低空飛行時要使用高精度的高度傳感器,通常采用無線電高度表。在該系統(tǒng)的實際設計中,采取了無線電高度表和線加速度計組合控制,即對無線電高度表和垂向線加速度計測量信息進行特定算法綜合處理后,得到靶機高度和垂向速度的兩路反饋控制信號,送到縱向姿態(tài)控制通道,形成高度控制外回路,與姿態(tài)控制內回路共同完成高度控制功能。








評論