可編程控制器解決車輛分散驅(qū)動的同步控制問題

當(dāng)車輛驅(qū)動電機采用分散驅(qū)動時, 受電機轉(zhuǎn)速不同步的影響, 可導(dǎo)致車體運行不協(xié)調(diào), 進而使電機轉(zhuǎn)速偏離正常值, 嚴重時會造成設(shè)備損壞。因此,解決車輛驅(qū)動電機在分散驅(qū)動時產(chǎn)生的電機轉(zhuǎn)速不同步問題具有現(xiàn)實意義。
本文介紹一種利用 plc解決車輛分散驅(qū)動時電機速度同步的先進實用的控制方法。
2 問題的提出
目前, 車輛的運行設(shè)備一般采用集中驅(qū)動( 見圖1) 和分散驅(qū)動( 見圖2) 兩種方式。集中驅(qū)動變頻器與電機的關(guān)系是“一拖多”; 分散驅(qū)動時兩者的關(guān)系是“一拖一”。

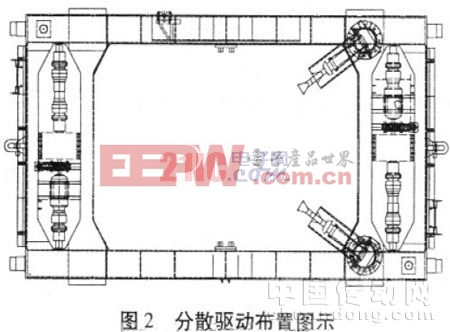
“ 一拖多”的優(yōu)點是控制簡單, 操作維護方便,但采用集中驅(qū)動布置, 要求車體具備較大的空間。當(dāng)車輛負載很大或者車體空間受到限制的時候, 通常采用“一拖一”的分散驅(qū)動方式, 因為其結(jié)構(gòu)緊湊,布局簡單。但一拖一對變頻器和電機有較高的要求, 特別是同步問題難以解決。如果電機轉(zhuǎn)速不一致, 會出現(xiàn)變頻器相對逆向做功, 輸出電流過大導(dǎo)致跳閘, 影響車輛的工作效率和電氣設(shè)備的使用壽命。如果轉(zhuǎn)速偏差過大, 則導(dǎo)致車體變形, 影響使用。
3 解決方法
采用PLC與變頻器控制方法, 實現(xiàn)多個分散驅(qū)動電機同步運行。PLC 采用西門子S7400 系列, 圖3為網(wǎng)絡(luò)拓撲圖。
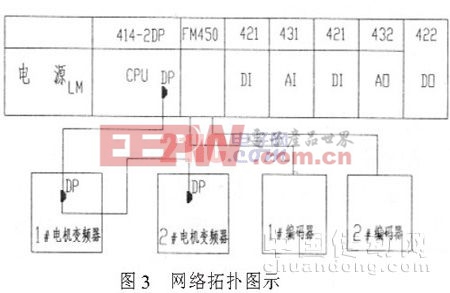
為實現(xiàn)兩臺牽引電機的速度同步, 采用兩臺變頻電機牽引, 并分別采用變頻器調(diào)速進行矢量閉環(huán)控制, 用PLC直接控制兩臺變頻器。在控制中, PLC與變頻器之間采用Profibus 聯(lián)接, 保證輸出信號源的同步性。以牽引電機1 的速度為目標速度, 由牽引電機2 的變頻器來調(diào)節(jié)其速度以跟蹤牽引電機1的速度。將兩臺增量式旋轉(zhuǎn)編碼器與電機同軸聯(lián)接, 使編碼器1 和編碼器2 分別采集兩臺電機的速度脈沖信號, 并將該信號送到PLC 的高速計數(shù)模塊中。PLC 以這兩個速度信號數(shù)據(jù)作為輸入控制量,進行比例積分控制運算( PID) , 運算結(jié)果作為輸出信號送至PLC 的模擬量模塊, 以控制牽引電機2 的變頻器。這樣, 就可以保證牽引電機2 的速度跟蹤并隨著牽引電機1 速度的變化而發(fā)生變化。使兩個速度保持同步。

pid控制器相關(guān)文章:pid控制器原理










評論