MEMS加速度傳感器的自動校準平臺

摘要:介紹了一種基于MEMS加速度傳感器的自動校準平臺的設計方案。從數學模型入手,推導了傾角測量算法并設計了調平控制方案。在電機控制環節加入改進后的PID算法,解決了輸出突變導致系統性能下降的問題。快慢檔的設定使系統在縮短調平時間的同時兼顧精度的要求。實驗結果表明,該系統工作穩定,可用于一般調平場合。
關鍵詞:MXC62025G;自動調平;PID控制;抗干擾
引言
現代測控系統在正常工作時往往需要一個基準平臺,在這樣的客觀需求下調平技術應運而生。目前該技術已廣泛應用于各種工業領域,如起重機支架、鉆井平臺、火炮底座、衛星天線基座、導彈發射平臺等。傳統的手動調平方式費時費力,嚴重影響了平臺上設備機動性能的發揮。自動校準平臺的研制彌補了手動方式的不足,并且在效率、精度、可靠性等方面都優于手動校準平臺。本文介紹了一種能夠實時監控平臺狀況并通過步進電機進行相應調節的自動校準平臺。
1 傾角測量原理
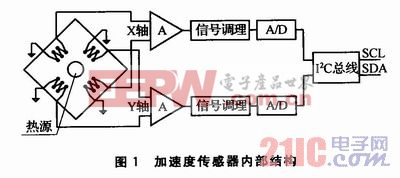
MXC62025G是美新(Memsic)公司推出的一款基于MEMS技術的雙軸加速度傳感器,集成了片上信號處理和I2C總線模塊,無需外接A/D轉換器便可以與微處理器通信。該傳感器可以同時測量恒定和變化的加速度,測量范圍為-2~+2 g,在25℃室溫、3 V工作電壓的條件下,其靈敏度可達512計數點/g。其內部結構如圖1所示,硅片中心有一個熱源,四周等間距地放置了4個熱電堆。當硅片水平靜止時,熱源周圍的溫度梯度是均勻的,所以4個熱電堆的溫度相同,輸出電壓相同。當硅片傾斜或在某一方向上有加速度時,熱源周圍的溫度梯度發生擾動,因而輸出電壓發生變化。
由于傳感器的輸出不能為負,因而需要減去一個偏移量來區分正負,此處取輸出值的中值,即最大值與最小值之和的一半。另外,傳感器的輸出是加載在兩個測量軸上的重力加速度的分量,要輸出傾角值還需進行數據處理。假設X軸向的傾角為α,Y軸向的傾角為β,則輸出值與傾角大小存在以下關系:
![]()
即

當傾角較小時,軸向加速度與傾角之間近似為線性關系,故有:![]() ,K值選取與傾角誤差之間的關系如表1所列。
,K值選取與傾角誤差之間的關系如表1所列。

不難看出,測量范圍與測量精度是一對矛盾。為了提高系統的精度,應當盡量減小平臺調節的幅度,所以自動校準平臺應當先大致擺放到水平位置再按啟動開關。

pid控制器相關文章:pid控制器原理
傾角傳感器相關文章:傾角傳感器原理











評論