基于IPM模塊的舵機控制電路設計

摘要:為了實現水下自主式機器人的控制,設計了一種基于IPM模塊的舵機控制電路。該電路將舵機控制信號與舵機位置反饋信號比較獲得的直流偏置電壓信號作為脈寬調制芯片UC1637的輸入信號。UC1637根據輸入直流偏置電壓信號的變化輸出不同占空比的PWM信號驅動IPM模塊內部不同IGBT的通斷,從而實現舵機的控制。該電路將IPM模塊和脈寬調制芯片UC1637用于舵機控制,使該電路具有成本低廉和容易實現的優點。實驗結果表明,該控制電路運行穩定,控制精度高,有很強的應用推廣價值。
關鍵詞:IPM模塊;舵機;脈寬調制;PWM
0 引言
絕緣柵雙級型晶體管IGBT是一種由雙級型晶體管與MOSFET組和的器件,它既有MOSFET的柵極電壓控制快速開關特性,又具有雙級型晶體管大電流處理能力和低飽和壓降的特點。IPM模塊與IGBT模塊相比,具有如下特點:內置驅動電路、過流保護、短路保護、控制電源欠壓保護、過熱保護及外部輸出的警報。本文將日本三菱公司的IPM模塊PM25RLA120和美國TI公司的電機控制芯片UC1637用于電動舵機控制。
1 設計原理
舵機控制原理框圖如圖1所示。

舵機是一種位置伺服的驅動器,其工作原理是:控制信號與舵機位置反饋信號比較,獲得直流偏置電壓,偏置電壓進入信號調制芯片產生一個比較電平,經過PWM控制芯片UC1637后,輸出一定占空比的PWM信號,用來驅動IPM電路中IGBT的通斷,從而實現電動舵機位置的控制。
2 舵機控制系統電路
2.1 以UC1637為核心的控制電路
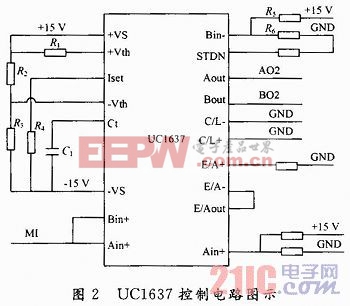
UC1637是TI公司針對直流電機控制設計的芯片,該芯片用來代替通常的驅動電路,內含三角波發生器、誤差放大器、脈寬調制器、欠壓保護、過流保護電路,提高了電機控制電路的集成度和系統的可靠性。舵機控制電路接收控制計算機發送的操舵信號,與舵機反饋信號比較,校正放大處理后,與一定頻率幅值的三角波信號比較后的信號輸入UC1637,在芯片內產生一個模擬誤差電壓信號,輸出二路不同極性的PWM控制信號,達到控制舵機打出不同舵角的目的。UC1637控制電路如圖2所示,MC2為三角波輸出信號,M12為UC1637輸入控制信號,A02,B02為輸出控制信號,兩路控制信號經過光電隔離后控制IPM模塊不同的回路的通斷控制舵機工作。

電路相關文章:電路分析基礎
pwm相關文章:pwm是什么
晶體管相關文章:晶體管工作原理
負離子發生器相關文章:負離子發生器原理 晶體管相關文章:晶體管原理 脈寬調制相關文章:脈寬調制原理 離子色譜儀相關文章:離子色譜儀原理








評論