基于單神經元PI控制的逆變器系統仿真

摘要:將一種根據誤差的大小來調節比例系數K值的單神經元PI控制器引入到逆變器的控制回路中,可以實現在線調整參數,在一定程度上不依賴于系統的模型。仿真結果表明:與常規的PI控制器相比該控制器的輸出超調量較小,有一定的自適應能力,可以提高逆變電源系統的動態性能。
關鍵詞:逆變器;單神經元PI;控制器;PWM;雙閉環
逆變器是將直流電能變換成交流電能的變流裝置,供交流負載用電或與交流電網并網發電。隨著光伏發電和太陽能發電等新興能源的興起,逆變器在生產和生活中顯得日益重要。為了改善逆變器的輸出特性,人們提出了并研究了多種控制算法。PID控制器以其簡單、參數易于整定等特點而得到廣泛的應用。但PID控制器依賴于精確的數學模型,且不具備在線調整PID參數的功能。單神經元具有一定的自學習和自適應能力,結合PID控制的優點可構成單神經元自適應PID控制器,這種控制算法對系統模型具有一定的自適應能力和較強的魯棒性,但過渡時間較長。針對單神經元自適應PID控制器的特點和不足,根據誤差的變化在線的調整對單神經元控制質量影響很大的比例系數K值。本文根據電源控制的特點,在逆變器控制系統中引入改進的單神經元PI控制器。
1 單神經元自適應PI控制器
基于單個神經元的PI控制器框圖如圖1所示。其中微積分模塊計算兩個量:x1(k)=e(k),x2(k)=△e(k)=e(k)-e(k-1)。采用有監督的Hebb學習算法,兩個權值的更新規則可以寫成:


其中ηi,ηp分別為比例、積分的學習速率。可以選擇這兩個權值變量為系統的狀態變量,這時控制率可以寫成:
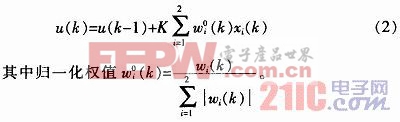
在這一算法中學習速率和比例系數是待定的系數。仿真實驗表明學習速率的取值對神經元系統品質影響不大,而比例系數K與系統的動態響應和穩定性有密切的關系。K值較大時,系統動態過程上升快,但超調量大,調節時間長;K值較小時,系統響應變慢,超調量減小,但如果K值過小,響應就跟蹤不上給定信號。這里采用一種根據誤差的大小來調節比例系數K值的方法。
K=a+be(k) (3)
式中a值用來保證K大于零,b是誤差的加權系數,保證K值不會過小也不會過大。當誤差較大時,K值也相應的增大,提高系統的響應速度;當誤差較小時,K值也會變小,從而降低系統的超調量。
從以上分析中可以看出,單神經元PI控制實質上仍然是PI的算法,但PI參數可以在線調整,一定程度上不依賴與系統的數學模型,在控制品質上有一定的優越性。









評論