基于ARM+Linux 的儀器控制系統設計

1.5 中斷控制實現本文引用地址:http://www.j9360.com/article/160288.htm
當外部信號的到來時刻不可預測時,使用輪詢方式將使得效率極低,需要使用阻塞型中斷實現。即沒有中斷信號到來時阻塞讀進程,使其處于睡眠狀態,當中斷到來喚醒讀進程,執行預定處理操作。
首先,在open方法中使用request_irq()安裝中斷處理程序,在release方法中釋放。函數原型如下:

其中:參數irq為中斷號;handler為ISR指針;flags為與中斷管理有關的各選項字節掩碼;dev_name即設備名;dev_id為中斷信號線。
其次,ISR為申請中斷時使用的參數名,假設為irq0_handler,定義原型如下:
![]()
中斷阻塞即在其內部調用void wake_up_inter-rupTIble(wait_queue_head_t*queue)實現,然后返回IRQ_HANDLED;在read方法中調用wait_event_in-terruptible(queue,condition)來喚醒讀進程,這樣,當用戶程序讀設備時,如果沒有中斷到來,讀進程將進入睡眠狀態,中斷發生被喚醒。
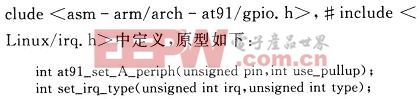
對于中斷信號IRQO,因是PB29復用,要配置為外設A[4],同時還要配置中斷源類型,函數分別在#in
2 編譯和調試
驅動程序可靜態編譯進內核,也可編譯成模塊動態加載。為便于調試采用動態模塊加載方式,Linux 2.6內核下驅動編譯方式和Linux 2.4版明顯不同,其建立的Makefile只需簡單地寫入obj-m:=devctl.O(假設源文件為devctl.c),然后執行命令:make-C/usr/lo-cal/arm/Linux-2.6.21.7 SUBDIRS=MYMPWDmodules,注意內核源文件目錄因各自系統而異,然后將生成的.ko文件置于目標系統的/home目錄下,使用insmod加載模塊,并使用cat/proc/devices命令查看分配到的設備號,使用mknod創建設備節點,卸載模塊使用rmmod命令。
為方便調試,可以在適當使用printk打印信息,還可以通過點LED等以便于發現問題。
3 結 語
通過對相關的Linux 2.6內核中驅動源碼的深入研究與自我設計實踐,不斷調試,在此闡述的方法得到實際驗證,并已成功使用到某儀器的控制系統中。Linux博大精深,其開源的特點必將吸引更多的開發者投入其中,使其更好發展,應用于更多領域。
linux操作系統文章專題:linux操作系統詳解(linux不再難懂)









評論