基于TI Z-STACK的智能小車調度系統設計

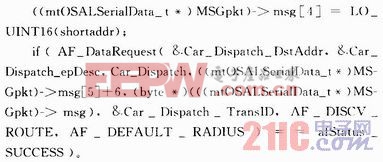
通信指揮車(Sink)在收到Endpoint發來的無線網信息后觸發AF_INCOMING_MSG_CMD事件,然后執行Car_Dispatch_MessageMSGCB(MSGpkt)回調函數,首先判斷信息類型(探路車、架橋車還足運輸車發送的),然后進行分析和下發指令(例如若是探路車發來路面遇阻信息,則按圖3向架橋車發送指令0x2A0x00 0x00 0x6F 0x79 0x02 0x01 0xFF 0x23,啟動架橋)。
3.3 51單片機程序實現
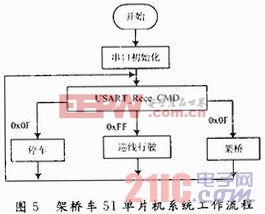
51單片機模塊主要用于小車巡線控制及串口通信。以架橋車為例,工作流程如圖5所示。串口設置為接收中斷模式,全局變量USART_Re ce_CMD用于控制小車的運行狀態,當通信指揮車下發指令后,車載CC2430模塊接收數據并進行解析,通過串口向51單片機發送指令,51單片機在串口接收中斷函數中修改USART_Rece_CMD的值,進而改變小車的運行狀態。本文引用地址:http://www.j9360.com/article/159897.htm
4 結語
本系統以51單片機為小車控制平臺,以CC2430為通信平臺,通過Z-STACK實現無線網絡組建,并以串口通信為紐帶,實現51單片機和CC2430的通信,由此實現了簡易的小車調度。本系統還可進行進一步擴展,例如開發上位機應用程序對協調器進行控制,可實現人機交互。本系統綜合運用了單片機、無線傳感器網絡及傳感器的知識,可應用于物聯網應用技術的專業實訓。










評論