循跡小車的追蹤與避障

5 系統軟件實現
5.1 傳感器檢測情況與驅動電路分段控制
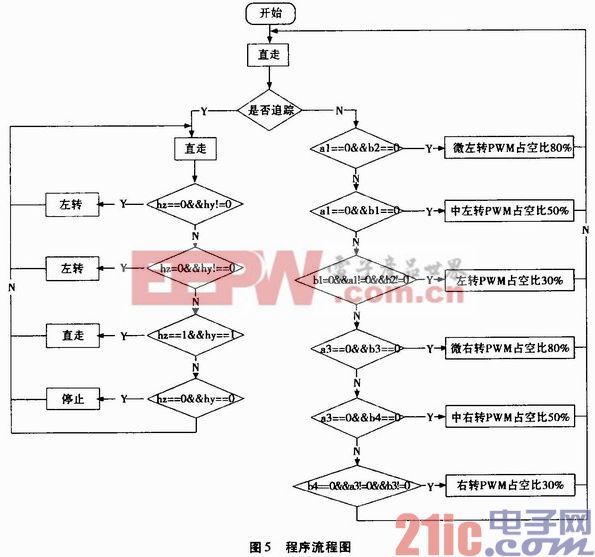
首先,紅外光電開關檢測前方是否有移動物體,若兩光電開關都未檢測到物體,此時小車開始循跡。由于實際的循跡黑線的弧度不一樣,所以我們用七個灰度傳感器來反映實際循跡黑線的彎度情況,同時應用單片機產生PWM占空比來配合不同的彎度,進而對電機驅動電路進行控制實現兩電機以不同的速度運行來實現適度轉彎。(1)當a1和b2檢測到黑線時,此時說明黑線的彎度比較小,單片機輸出PWM占空比為80%,其輸出到電機驅動電路從而小車實現微小左轉彎。(2)當a1和b1檢測到黑線時,說明彎度較大,單片機輸出PWM占空比為50%,此時小車實現較大轉彎。(3)當僅b1檢測到時,說明此時小車彎度很大,這時單片機輸出PWM為300A,進而實現很大的轉彎;由于傳感器排布左右對稱,所以右邊情況類似。其次,當紅外開關檢測到前方有移動物體時,此時程序進入追蹤模式,由于物體移動比較快,所以我們不再用PWM進行平緩轉彎,而是直接由電機正反轉來實現小車的快速轉彎。(4)當僅左邊紅外檢測到物體時,單片機直接產生0、1信號來讓左電機反轉,右電機正轉,進而實現快速左轉。(5)當僅右邊紅外檢測到物體時,單片機直接產生0、1信號來讓右電機反轉,左電機正轉,進而實現快速右轉。(6)當左右同時檢測到時即停轉,使小車停下,程序流程圖如圖5所示。本文引用地址:http://www.j9360.com/article/159610.htm
最后,若對程序進行相應的更改即能實現避障,即當紅外光電開關檢測到物體時,使小車轉相應的角度即可實現避障。
6 結論
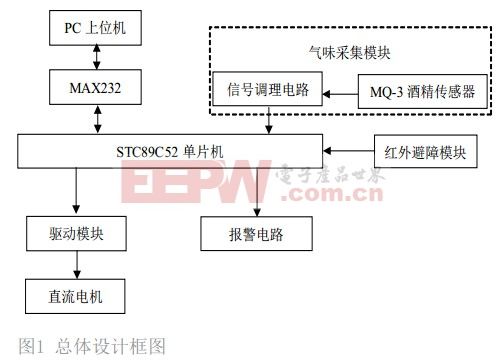
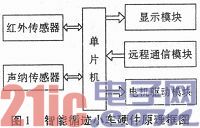
本文提出了一種基于單片機控制的智能循跡,追蹤,避障小車的設計制作方法,它以STC89C52為控制核心,直流減速電機為執行元件,IR9909型反射式傳感器作為循跡元件,接近開關作為避障與追蹤元件。經過實驗驗證,該小車能自動循跡,追蹤與避障,并能穩定運行。該小車智能化小車的研究不僅具有很大的現實意義,還具有極為廣闊的應用前景和市場價值。



評論