基于Matlab的模糊PID控制研究

摘要:以螺旋槳的電液比例周控制系統為研究對象,針對被控對象的非時變性和時變性的特點,采用了一種基于自適應模糊PID控制策略;利用Madab中Fuzzy和Simulink有機結合,方便的實現了模糊自整定PID參數控制系統的仿真;得到了自適應PID模糊控制比普通PID控制在被控對象上具有實時性好、穩定性高的結論。
關鍵詞:螺旋槳;模糊PID控制;電液比例閥;Matlab仿真
0 引言
電液比例閥系統廣泛應用于精度要求高的機械加工等行業,其傳統的控制方式大多采用常規的PID控制技術,它具有簡單、可靠、參數整定方便等優點。但由于電液比例閥系統受溫度、負載等參數變化的影響較大,因而在控制性能要求高的場合往往不能滿足。其主要原因是電液比例系統在流體動力學及電磁轉換方面具有特殊性,是復雜的非線性高階系統,系統設計時要建立準確的數學模型比較困難。
因此,如何使PID控制更好的應用于非線性系統的控制,并具有較好的智能性,是個值得研究的問題。基于以上原因,如果將基于規則的模糊控制用于PID控制器的設計,一方面可使PID控制器具有模糊控制的功能,又可使模糊控制具有確定的控制結構,從而使所設計的控制器具有兩種控制的優點,同時又彌補對方的不足,達到既提高系統的動態特性,又保證系統穩態精度的要求,從而確保良好的設備控制效果。
1 電液比例閥的模糊PID控制器設計
1.1 模糊控制器的設計
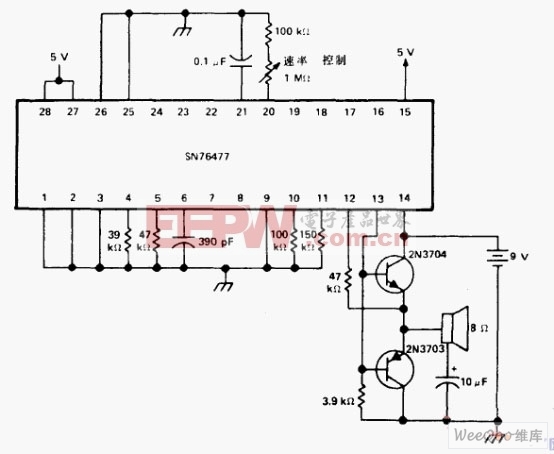
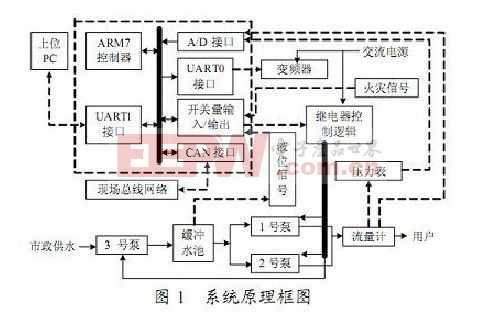
螺旋槳電液比例閥控制系統結構如圖1所示。

自適應模糊PID控制器以誤差E和誤差變化率Ec作為輸入,可以滿足不同時刻偏差E和偏差變化率Ec對參數自調整的要求。利用模糊控制規則對參數進行修改便構成了自適應模糊PID系統。如圖2所示。
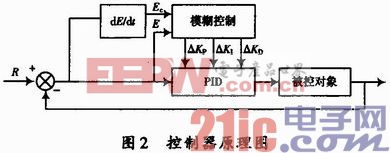
在本系統中模糊控制器將是設計的核心,因為它的好壞將直接影響到KI,KD和KP的選取,從而影響到系統的控制精度。
1.2 各變量隸屬函數的確定
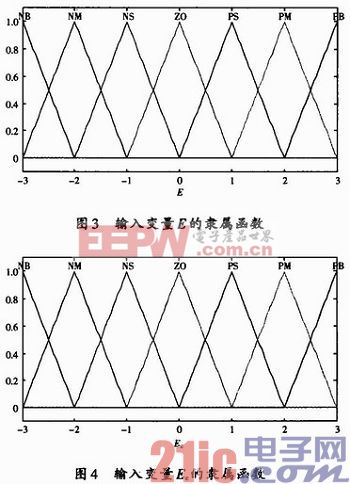
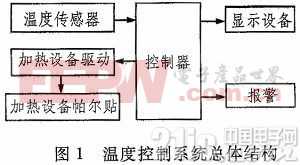
由文獻可知,根據PID參數自整定原則,用于PID參數控制的模糊控制器采用二輸入三輸出的模糊控制器。以E和Ec為輸入語言變量,以KI,KD和KP為輸出語言變量。輸入語言變量的語言值均取為“負大”(NB)、“負中”(NM)、“負小”(NS)、“零”(ZO)、“正小”(PS)、“正中”(PM)、“正大”(PB)七種。輸出語言變量的語言值均取為“零”(ZO)、“正小”(PS)、“正中”(PM)、“正大”(PB)四種。將偏差E和偏差變化率Ec量化到(-3,3)的區域,輸出量化到(0,3)的區域內,隸屬函數曲線如圖3,圖4所示。
1.3 模糊規則
由于控制品質的好壞主要取決于控制參數的選擇是否合理,通常不同的偏差E和偏差變化率Ec對PID控制器參數KP,KI,KD的整定要求不同。根據已有的控制系統設計經驗,以及參數KI,KP和KD對系統的輸出特性的影響關系,歸納出在一般情況下,不同的和時,被控過程對參數KI,KP和KD的自調整規則如下:
(1)當|E|較大時,為了加快系統的響應速度,應該取較大的KP。但為了避免由于開始時的偏差|E|的瞬時變大可能出現的微分過飽和而使控制作用超出許可的范圍,應取較小的KD,同時為了防止系統響應出現較大的超調產生積分飽和應對積分作用加以限制通常取KI=0。
(2)當偏差|E|處于中等大小時,為使系統響應具有較小的超調,KP應取得小些。這時,KD的取值對系統影響較大,取值要大小適中以保證系統的響應速度。
(3)當偏差|E|較小即接近于設定值時,為使系統具有良好的穩態特性,應增加KP和KI的取值。同時為避免在系統的設定值附近出現振蕩,KD值則根據|Ec|來確定:當|Ec|較小時,KD可取值大些;|Ec|較大時,KD應取小些。

pid控制相關文章:pid控制原理
pid控制器相關文章:pid控制器原理
評論