一種多制式傳感器的數據融合算法

摘要:為了對付現代戰爭的“四大威脅”,采用分布式、多制式傳感器組網對敵方目標進行探測已經變得十分必要,而多制式傳感器組網的關鍵技術之一是數據融合問題。分析了三坐標雷達、兩坐標雷達和紅外探測器這三種常見種類的傳感器點跡幾何模型,提出了一種針對這三種不同制式傳感器的數據融合算法,并在某工程中得到了成功應用。
關鍵詞:多制式;測量相關;航跡相關;數據融合
0 引言
將不同制式的傳感器采用分布式、組網探測的方式能夠有效對付現代戰爭的“四大威脅”。在分布式組網探測系統中,通常采取如下方式進行處理:首先由各個探測器形成局部航跡;然后將航跡數據上報到上級情報中心;最后情報中心對各局部航跡進行數據融合得到一個次優的融合航跡。多種傳感器的目標關聯方法主要有兩種方案,一種是測量一航跡關聯方案;另一種是航跡一航跡關聯方案。
本文在此分析討論的航跡一航跡關聯算法,適用于包含有三坐標雷達、兩坐標雷達和紅外探測器這三種傳感器組成的分布式網絡處理系統。在該分布式處理系統中,各個探測器先各自形成獨立的局部航跡,然后將航跡數據上報到情報融合中心進行數據融合處理并最終形成融合航跡。情報融合中心數據處理的難點在于有三種探測器測量值形式各不相同,除三坐標雷達的局部航跡可以提供狀態估計以外,另外兩種傳感器都僅能提供每條局部航跡對應的測量集。
1 模型建立與分析
下面以三種探測值的幾何模型為基礎定義測量一測量間的距離,在此基礎上進一步定義了測量集一測量集間的距離,并作為航跡一航跡關聯的定量度量。通過這種處理后,航跡關聯問題被轉化為了單純的聚類問題。在狀態估計上本文采用數據壓縮方式。即先用極大似然估計法從相關的多個測量數據中估計出融合點跡中心,最后用卡爾曼濾波器組得出最終的融合航跡。
1.1 三坐標探測器點跡的幾何模型
三坐標雷達的測向量為z=(r,θ,φ),其中r為斜距,θ為方位角,φ是高低角。三坐標雷達點跡測量幾何模型如圖1所示。
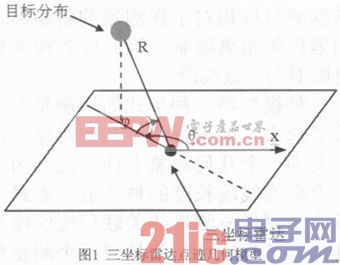
三坐標雷達的一次測量能夠確定目標在z=(r,θ,φ)所代表的點的附近,因此其測量點跡的幾何模型為一個點。
1.2 兩坐標雷達點跡幾何模型
兩坐標雷達的測向量形如z=(r,θ,φ),其中r為斜距,θ為方位角。兩坐標雷達點跡幾何模型如圖2所示。
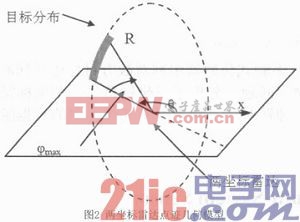
兩坐標雷達只能探測到斜距和方位角,通過其測量只能確定目標在一個位于豎直平面內的半徑為r的圓弧附近。并且受兩坐標雷達高低角探測范圍限制,所以兩坐標雷達的測量點跡的幾何模型為一段弧線。


評論