基于DSP交流伺服系統與CAN總線的通信設計

1 DSP的CAN控制器
TI公司的低功耗、高速DSP芯片TMS320LF2407A具有高速運算能力和高效控制能力。其內嵌的CAN控制器是一個完全的CAN控制器,完全支持CAN2.0B協議,它主要有以下特點:有6個郵箱,其數據長度為0~8 B,其中接收郵箱有局域接收郵箱屏蔽寄存器,在發送出錯或仲裁時丟失數據的情況下,有自動重發功能、可編程的位定時器和總線錯誤診斷功能。
CAN控制器的內部結構圖如圖1所示。
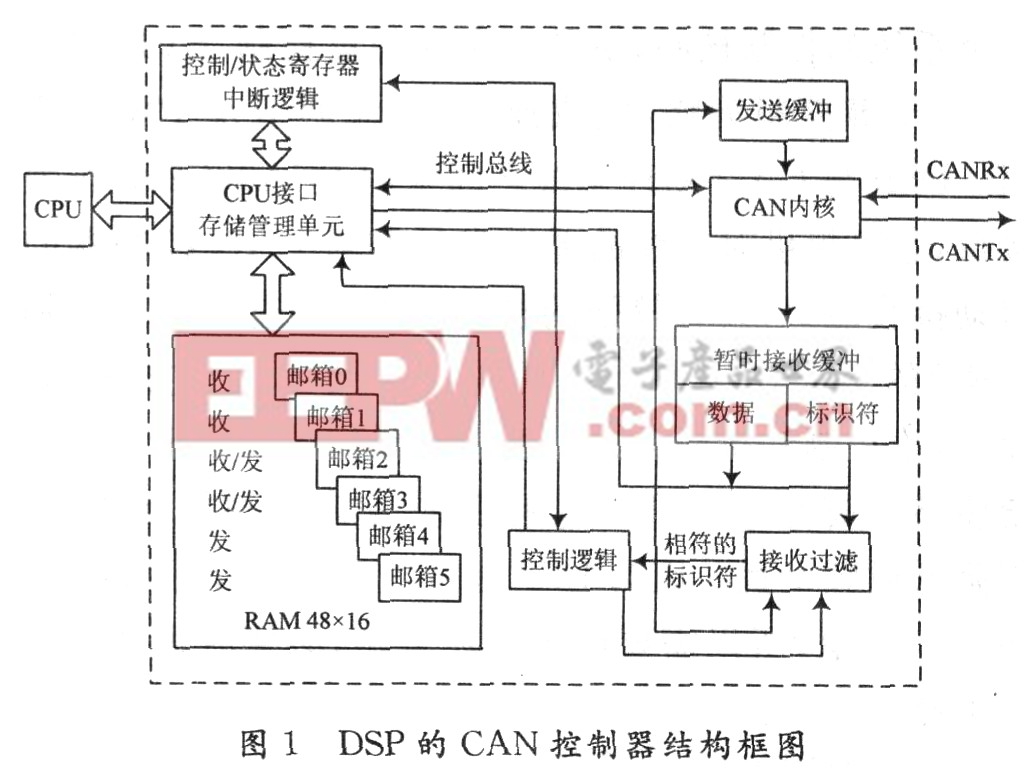
工作過程如下:CAN控制器在接收信息時,先將要接收信息標識符與相應接收郵箱的標識符進行比較,只有標識符相同的信息才能被接收;接收信息時,將數據存入郵箱,標識符存入相應的寄存器;接收完成后,中斷標志位被置位。CAN控制器在發送信息時,先將要發送的數據寫入郵箱,再設置發送請求位,發送完成后發送應答信號和中斷標志位被置位,如果發送失敗,發送郵箱將再次發送。
2 系統結構
使用CAN總線的交流伺服系統結構原理圖,如圖2所示。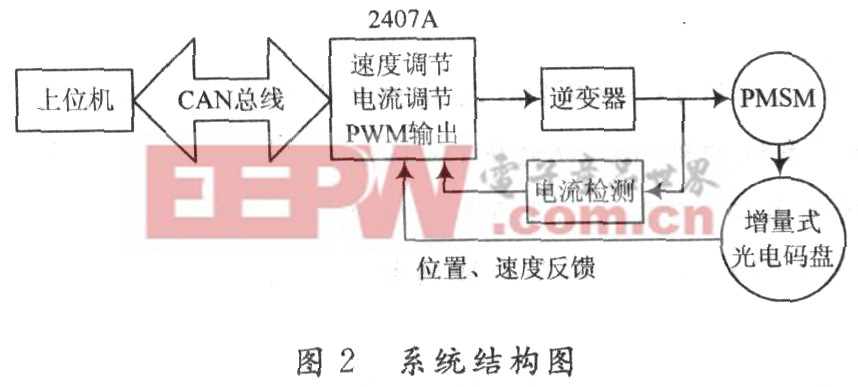
上位機采用帶有CAN適配卡的通用計算機,上位機的主要功能是:通過CAN總線接口與DSP進行通信,接收DSP傳來的數據進行處理并向節點發送控制指令。節點負責數據采集、控制、執行。上位機和節點之間通過CAN網絡實現數據交換。










評論