基于DSP交流伺服系統與CAN總線的通信設計

3.2 CAN通信軟件設計
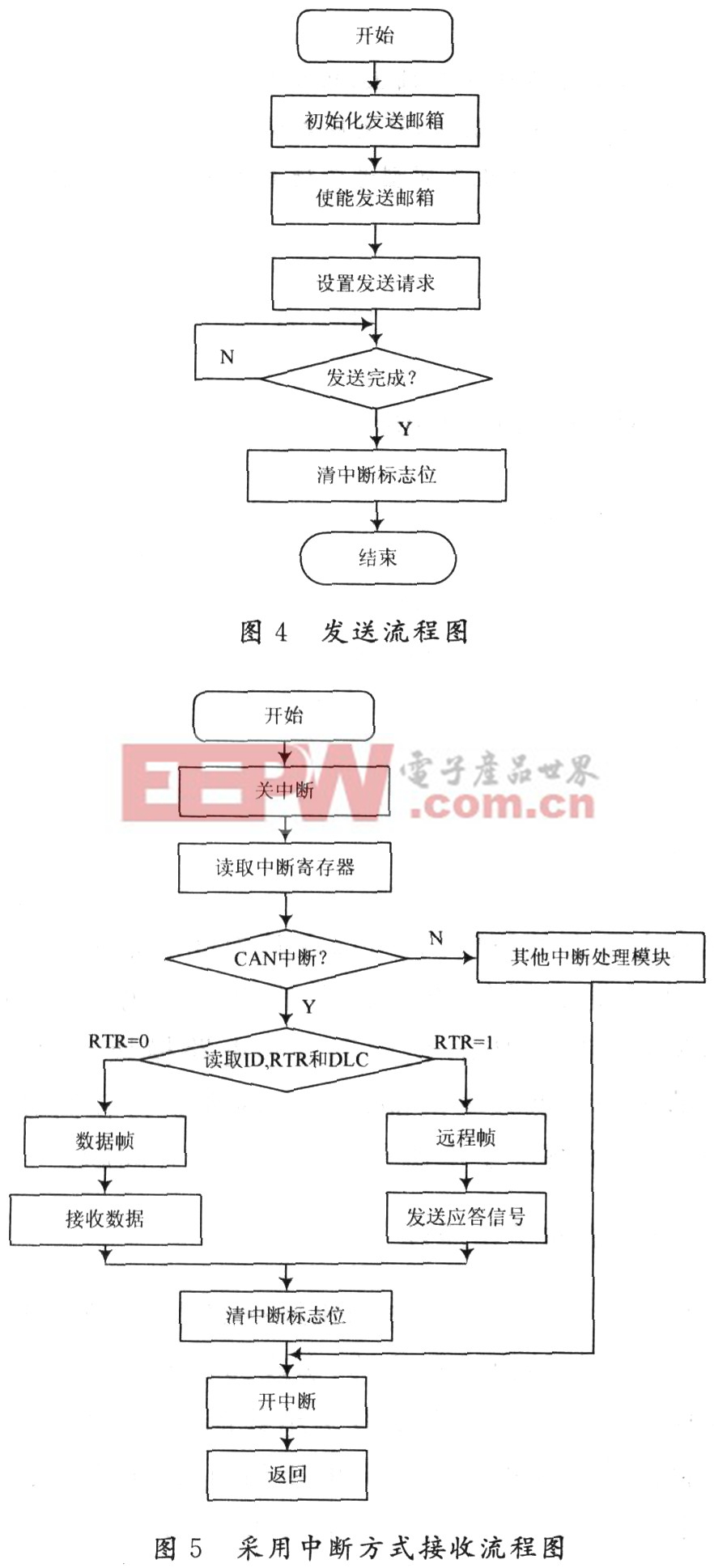
CAN總線的軟件設計包括3個主要部分:CAN芯片的初始化、信息的發送、信息的接收。CAN芯片的初始化包括位定時器的設置及對郵箱進行初始化。設置位定時器就是對寄存器BCRl,BCR2進行設置,確定CAN控制器的通信波特率、同步跳轉寬度、采樣次數和重同步方式。初始化郵箱主要是設置郵箱的標識符、發送的是數據幀還是遠程幀、對發送數據區賦初值。
信息的發送采用查詢的方式,接收可采用中斷方式,也可采用查詢方式。流程如圖4和圖5所示。
 本文引用地址:http://www.j9360.com/article/158097.htm
本文引用地址:http://www.j9360.com/article/158097.htm調試時,可先編寫自測試程序(MCR的ATM位置1),然后分別調試發送和接收模塊,最后進行收發聯調,這樣可以加快調試進程。需要注意的是,在自測試模式時,不需要與CAN總線相連,接收信箱接收CAN自身的發送信箱發送的信息幀,產生應答信號,但是不能接收標識符。接收信息時,注意接收屏蔽使能位AME的設置:AME=0時,禁止相應的標識符屏蔽,接收信箱的標識符必須與被接收的信息標識符相符才能接收;AME=1時,使能相應的標識符屏蔽,設置局部接收屏蔽寄存器(LAM)。
4 結 語
這里主要是在實驗室環境下,對CAN總線在變頻器系統中的應用做了研究,將TMS320LF2407A用于變頻調速系統,充分利用DSP強大的運算功能和豐富的外圍接口電路,同時,將CAN總線引入到現場數據的傳輸中,從而提高了網絡的可靠性和容錯能力。實驗結果表明,該系統正確、可靠、擴展性好。CAN總線抗干擾性強,控制效果較好。CAN總線上如果有多個以2407A為控制核心的變頻調速系統,以不同的標識符來區別各個節點,多節點DSP的硬件接口設計與單節點的設計完全一樣。










評論