基于DSP的異步電機矢量控制系統設計

0 引言
隨著現代控制理論、微處理技術和電力電子技術的不斷發展,基于矢量控制的高性能交流傳動系統得到廣泛的應用。異步電機是一個多變量、強耦合、非線性的時變參數系統,若以轉子磁通這一旋轉的空間矢量為參考坐標,再利用坐標變換,就可以把定子電流中的勵磁分量和轉矩分量獨立開來分別進行控制。這就是矢量控制的出發點。SVPWM調制技術把逆變器和電機看成一個整體來處理,所得模型簡單,便于處理器實時控制,并具有轉矩脈動小、噪聲低、電壓利用率高等優點。本文以TI公司的專用電機控制芯片TMS320F2812為核心,給出了整個異步電機矢量控制系統的設計方案,并通過實驗驗證了其有效性。
1 異步電機矢量控制原理
矢量控制技術自從上世紀60、70年代開始,國內外眾多專家學者就已經進行了潛心的研究,因此,矢量控制技術發展至今,內容已經非常豐富。本文只討論基于轉子磁場定向的矢量控制原理。
1.1 異步電機控制的數學模型
鼠籠式異步電機在d,q兩相同步旋轉坐標系下的數學模型的電壓方程為:
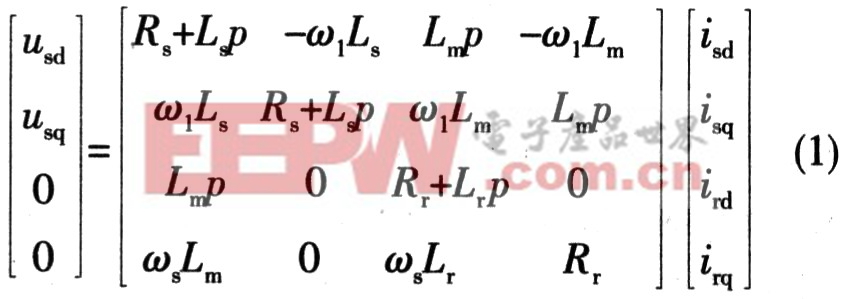
其中:usd和usq分別為d,q旋轉坐標系下的定子電壓;isd和isq分別為d,q旋轉坐標系下的定子電流;ird和irq分別為d,q旋轉坐標系下的轉子電流;Rs和Ls分別為定子繞組的電阻與自感;Rr和Lr分別為定子繞組的電阻與自感;Lm為定轉子互感;P為微分算子;ω1為同步旋轉角頻率;ωs為轉差角頻率;
將轉子磁鏈矢量定在d軸方向上,可以推導出轉子磁鏈為:

其中:Tr為轉子時間常數。
由式(2)可見,調節定子電流的isd分量可以調節轉子磁鏈ψr,而當保持該定子電流磁通分量不變時,轉子磁通保持不變。其轉矩方程為:

其中:Te為電磁轉矩;np為電機的極對數;由式(3)可見,控制定子電流isq分量可以控制電機的電磁轉矩Te,通過該轉矩分量可以調節電機的轉速。該控制系統采用雙閉環結構,圖1所示是其控制系統結構原理圖。

該控制系統所檢測的兩相定子電流經Clarke與Park變換后可產生轉矩電流分量和勵磁電流分量,然后結合檢測轉速并通過電流模型計算坐標變換所需的磁鏈角。檢測轉速與給定轉速誤差經PI調節后將生成轉矩給定值。轉矩電流分量與勵磁電流分量的誤差經PI調節可產生u小M。給定值,并在通過旋轉坐標變換后輸入SVPWM模塊以產生6路PWM波,從而控制逆變器。











評論