基于ARM的六相位交通信號機設計

摘要:針對傳統信號機相位少,運算性能低的缺陷,設計了以LM3S8962為控制核心的六相位交通信號機。在設計平面交叉口六相位模型的基礎上,給出信號機控制模式、信號配時參數。根據信號機功能要求及LM3S8962的資源特性,給出信號機的硬件設計方案。利用模塊化設計方法,完成各功能模塊軟件設計,并進行了系統整體測試。測試結果表明,設計的基于LM3S8962的六相位交通信號機功能完善、運行穩定,對于城市復雜平面交叉口,其控制效果優于傳統信號機。
關鍵詞:嵌入式系統;交通信號機;六相位;LM3S8962
0 引言
隨著我國城市化飛速發展,路面交通擁堵問題日益嚴重。交通信號機作為緩解交通擁堵問題的重要手段之一,其核心控制器主要包括兩類:一類是單片機控制器,這類控制器基于8/16位單片機,功能簡單,控制方式單一;另一類采用工控機作控制器,功能強大,但結構復雜且多冗余,成本高。相位控制方面,傳統的信號機主要為兩相位和四相位信號控制。兩相位控制時,直行方向和左轉方向同時放行,左轉車輛與對向直行車輛形成沖突,極易造成交通事故;四相位控制時,將右轉方向作為常通狀態來對待,這顯然忽視了沒有過街天橋或地下通道的情況下行人安全通行的要求。
針對上述傳統信號機的缺陷,本文提出了一種基于ARM芯片LM3S8962的六相位交通信號機的系統控制方案及其軟硬件設計方法。
1 六相位信號機控制方案
信號機的控制方案是相位設置、相序設置、信號配時的有序集合,是信號機運行的數據源,因此對信號機控制方案的研究異常重要。
1.1 平面交叉口六相位模型
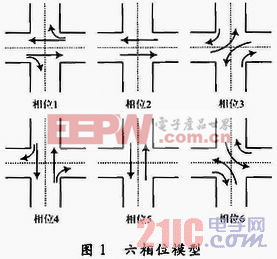
本文對左轉方向、右轉方向分別加以考慮,將十字路口的信號相位分為6個相位,如圖1所示。其中,相位1,3,4,6用于機動車,相位2,5用于機動車、非機動車和行人。從該模型中可以看出,僅1,4相位放行時產生兩個分流點,其余各相位放行時不產生任何接觸點,較之傳統的兩相位、四相位控制模型大幅減少了交通接觸點,因此,能夠更有效地降低事故隱患。
1.2 控制模式與信號配時
本文采用對交通流時間分割的方法,按照設定的通行相序為每一相位分配一定的通行時間,在一次通行周期中,各個相位的通行對象均會得到一次通行權。考慮到未來交通控制系統的要求,同時兼顧傳統信號機的控制方式,本文為信號機設計了多時段、定周期、手動、黃閃四種控制模式。
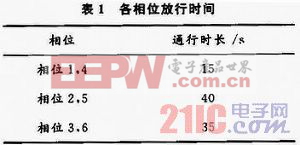
信號配時方面,為了保證各方向的通行對象能夠安全地通過交叉口,每個方向的通行時間不能少于15 s,而為了避免各方向通行對象等待時間過長,信號周期時長不宜超過200 s。表1給出六相位信號機的一種信號配時方案,通行相序為相位1至相位6,黃閃時長3s。










評論