基于DSP的嵌入式通用主動視覺系統

4 系統軟件設計
4.1 C6711軟件實現
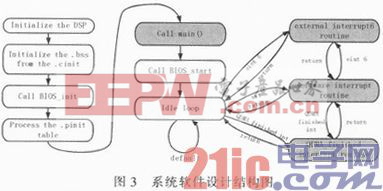
C6711軟件設計過程中充分地考慮流水線處理的特點,充分發揮流水線的功能實現多種任務并行執行是設計的關鍵。因為系統采用幀緩沖存儲結構只能完整地保存一行圖像數據,所以當一行結束時必須及時將數據從幀緩沖存儲中讀出來。設計中采用C6711的QDMA功能實現圖像數據的讀取,減少C6711計算資源的占用并實現C6711運算資源的最大利用。軟件流程如圖3所示。本文引用地址:http://www.j9360.com/article/148023.htm
4.2 F2812電機控制實現
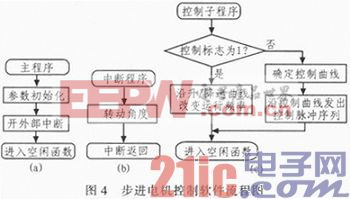
主動視覺系統對平臺運動速度提出比較高的要求。步進電機在高速轉動控制中容易出現失步的問題。電機失步會引起角度控制的誤差,在控制中必須加以避免。避免步進電機失步是電機控制軟件設計中的關鍵。為避免步進電機在加速和減速時出現失步,在加速和減速時采用升速/降速曲線進行控制,其控制軟件流程如圖4所示。
5 實驗應用
5.1 圖像采集實驗
圖像采集是系統中非常重要的一環,圖像采集質量的好壞直接影響到目標檢測的成敗。實驗中通過編寫專門的圖像采集程序,將采集到的圖像存放在C6711DSK的SDRAM中,然后通過CCS2.0的圖像調試工具讀取圖像,并在CCS調試界面中顯示出來,從而驗證圖像采集質量的好壞。圖像采集的實驗結果如圖5所示,實驗結果說明圖像清晰完整且顏色正常。

5.2 目標跟蹤實驗
在實驗室真實環境下采用桔紅色的排球作為跟蹤目標,在距離系統正前方1.5米左右處以不同方式運動。跟蹤控制采用比例控制實現,通過對靜止、水平往復運動、垂直往復運動、圓周運動目標的跟蹤性能的分析驗證系統的性能。圖6顯示了系統對水平往復運動目標進行跟蹤的結果。
6 結論
文中將TMS320C6711的運算能力和TMS320F2812的控制能力和豐富的外圍接口相結合實現了高性能主動視覺系統。圖像采集由專用視頻解碼芯片完成,通過FIFO實現視頻解碼器與C6711的互聯,通過DMA方式讀取FIFO中的數據。這樣的設計充分發揮了C6711流水處理的特點,提高計算資源的利用率。采用F2812提供的接口實現了傳感器數據采集和PC機之間的通訊,彌補了C6711在運動控制和接口資源方面的不足。實驗結果表明設計可行,系統性能達到設計要求。



評論