國產化衛星/MEMS組合導航模塊的設計實現

摘要:設計一種嵌入式衛星/MEMS組合導航模塊。該模塊采用北京時代民芯科技有限公司的國產化GPS/BD多模導航接收機,實現與MEMS慣性器件的軟硬件融合。基于工程化應用,提出一種高可靠擴展卡爾曼濾波器濾波算法,實時校準各種誤差項,改善組合導航模塊性能。在靜態情況下,模塊姿態角誤差小于0.2°,航向角誤差小于0.5°。在動態情況下,姿態角與航向角誤差小于1°,如果衛星導航突然中斷,將能持續30秒,定位精度維持在20米內。
本文引用地址:http://www.j9360.com/article/134653.htm引言
隨著北斗導航應用的不斷推廣,國產導航芯片和模塊持續升級,各領域應用對北斗導航產品性能提出新的要求:低成本、低功耗、小型化、高精度。
其中,GPS/BD多模導航的實現,很大程度滿足國內外需求,集合MEMS慣性傳感器的組合導航模塊,進一步豐富多層面用戶應用。與傳統導航系統相比,衛星/MEMS組合導航模塊,采用較低成本的MEMS慣性器件,極大降低導航系統成本、功耗和體積,與此同時,MEMS慣性器件具有瞬間較高精度的特點,彌補衛星導航不連續、輸出頻率不高、易失鎖等不足[1~3]。
由于MEMS-IMU(IMU,慣性測量單元)精度仍處于較低水平,無法單獨實現導航。通常采用MEMS-IMU與衛星導航接收機、磁強計等相結合的方式,構建組合導航模塊,實現較高精度姿態控制與導航定位[2]。
為了適合特定導航應用,提出一種衛星/MEMS組合導航模塊用工程化濾波算法。并在嵌入式平臺上實現。
衛星/MEMS組合導航,通過算法實現角速度校準,加速度校準,以及磁校準;估計載體姿態角度,位置和速度信息,并以較高的輸出速率實時更新。該系統中采用擴展卡爾曼濾波器(EKF)估算并校準系統狀態量。通過融合衛星導航信息和磁強計信息,實時校準系統姿態、位置、速度和傳感器誤差。該EKF融合算法,考慮到傳感器主要特性:零偏、標度因數誤差、正交耦合誤差等。此外,由于磁強計感測地磁場強度時,會受到硬鐵和軟鐵干擾,因此在濾波器中對其進行估計。在靜態情況下,系統姿態角誤差小于0.2°,航向角誤差小于0.5°。在動態情況下,姿態角與航向角誤差小于1°,如果衛星導航突然中斷,將能持續30秒,定位精度維持在20米內。
模塊設計
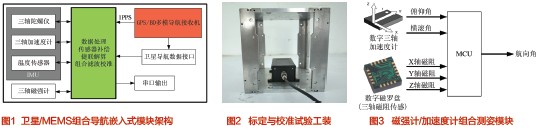
綜合考慮成本、功耗、體積、可靠性等因素,衛星/MEMS組合導航模塊采用嵌入式平臺開發方案[6],如圖1所示。系統由處理器、MEMS-IMU、GPS/BD多模導航接收機、磁強計等重要部件組成。
姿態與航向校準算法
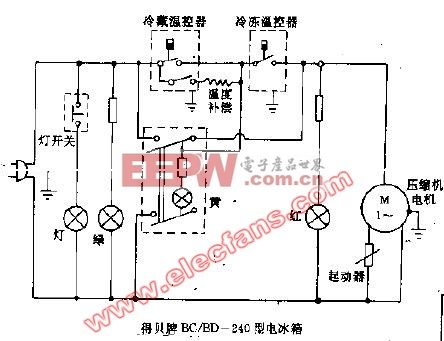
理想情況下,將陀螺感測的角速度信息融入姿態處理器,在獲悉載體初始姿態情況下,同時認為陀螺的輸出比較精準,一般的解算足以獲得夠用的姿態信息。然而,通常初始姿態無法準確獲得,陀螺和加速度計都遭受隨機漂移、失準角誤差、加速度敏感誤差、標度因數誤差及其非線性等因素的影響,磁強計存在磁感應失真等。如圖2所示,通過工裝將模塊安裝于測試設備上,設計合理標定流程和算法,便可獲得陀螺和加速度計常值零偏、標度因數、失準角誤差量等關鍵參數。
通常在組合模塊安裝好之后,對磁強計的誤差和干擾進行校準。姿態與航向解算中,陀螺的漂移引起的誤差最大,如果沒有濾波算法,解姿信息將不斷偏離真實數值。該卡爾曼濾波器提供在線陀螺漂移校準,加速度計提供重力軸系參考,磁強計通過與加速度計配合,提供航向參考。
姿態估計算法中,提供穩定的三維歐拉角roll、pitch、yaw,為了提高精度并避免奇異,采用四元數法實時更新方向余弦矩陣。MEMS陀螺感測到載體角速度,通過差分方程實時更新姿態四元數,同時獲得更新后的方向余弦矩陣,從而獲得姿態角的更新。
卡爾曼濾波器姿態校準的實現,之所以能夠改善性能,主要在于它能夠準確估計出陀螺的漂移和姿態誤差。這種方式的優點是:濾波器估計了絕對姿態誤差,因而無論是哪一部分誤差污染了姿態角,都可以直接用其來校準姿態角輸出。姿態與航向校準模塊,采用EKF,包含兩個部分:線性姿態誤差與陀螺漂移模型,非線性姿態四元數誤差模型。狀態模型基于陀螺輸出數據,預測姿態誤差和陀螺漂移,量測模型采用真實世界的姿態誤差量測值校準預測部分,該姿態誤差量測值由加速度計與磁強計獲得。這兩個參考數據源向卡爾曼濾波器提供適當的置信水平[4]。
航姿模塊路測試驗
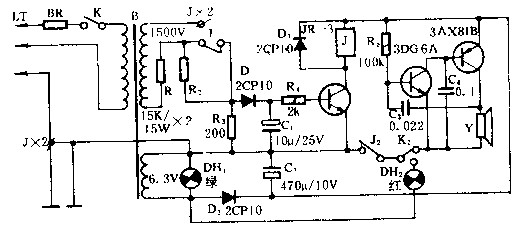
為了能夠正確推算模塊的姿態、速度、位置等信息,準確對準初始姿態是十分必要的。由于低精度MEMS陀螺不能感測到地球自轉角速率,因此不能采用傳統的自對準方法實現初始化對準。基于系統方案,將磁強計與MEMS加速度計進行組合,構成測姿模塊,實現初始化對準。如圖2所示,單片磁強計由三軸正交磁阻傳感器與數字化ASIC接口構成,磁強計不能單獨確定航向角,需要MEMS-IMU模塊中的加速度計配合,輔助磁強計精確確定航向角[2]。
加速度計相關文章:加速度計原理






評論