智能駕駛中預測模塊簡介

1.軌跡預測的定義
軌跡預測是自動駕駛系統“感知-預測-規控”流程中的核心環節,位于感知與規劃模塊之間,起到承上啟下的作用。感知系統負責檢測道路環境中的動態和靜態元素,包括車輛、行人、自行車、交通標志、車道線等,而預測模塊的任務是對這些動態對象(Agent)的未來軌跡進行推測,為后續的決策和規劃提供參考。
在實際應用中,軌跡預測通常基于以下兩類輸入信息:
map 信息:包括車道線、交叉口、可行駛區域等靜態元素。
Agent 信息:如位置、速度、航向角等動態信息。
軌跡預測主要涉及兩個方面:
預測完整軌跡:從當前位置到終點的運動路徑,同時考慮不確定性建模問題。
現在大家不都是在提倡感知規控“端到端”嗎?為什么還要拆開介紹?個人理解:完全端到端還有一段時間要走,了解預測模塊,沒什么壞處。
2.軌跡預測的定位
在傳統的自動駕駛系統中,感知模塊輸出的結果直接影響預測模塊,而預測模塊的輸出又會影響決策與規劃模塊。然而,這種架構存在一定的局限性:
誤差傳遞:如果感知模塊未能正確檢測到某個 Agent,預測模塊也無法給出合理的軌跡預測。
系統僵化:預測模塊僅依賴感知結果,缺乏對未來可能性更全面的理解,難以適應復雜場景。
因此,近年來大家都在研究如何使預測與感知更緊密結合,以提高系統的魯棒性。
3.軌跡預測的挑戰
軌跡預測面臨的挑戰有多個方面,例如:
感知誤差傳遞 如果感知模塊未能準確捕捉 Agent 的運動軌跡,預測模塊的結果也會受到影響。例如:感知模塊可能對某輛車的位置和速度估計不準確,影響軌跡預測。
不確定性挑戰 軌跡預測是一個不確定性問題,即同一個 Agent 在未來可能采取多種不同的行動。例如:車輛可能選擇直行、變道或停車、行人可能選擇繼續行走或停下。如何處理這些不確定性,很有挑戰。
Corner Case 處理 自動駕駛系統必須能夠應對極端情況(Corner Cases),例如:“鬼探頭”、“汽車 S 形行駛”等不常規情況的預測。
預測與決策的配合 預測模塊的輸出通常是多個可能軌跡,而決策和規劃模塊需要根據這些軌跡做出合理判斷。例如:過于保守的預測可能會讓自動駕駛車輛頻繁剎車或減速,影響駕駛體驗;過于激進的預測可能會導致錯誤判斷,提高事故風險。
4.典型預測算法
本節知道幾個軌跡預測算法名字就行。
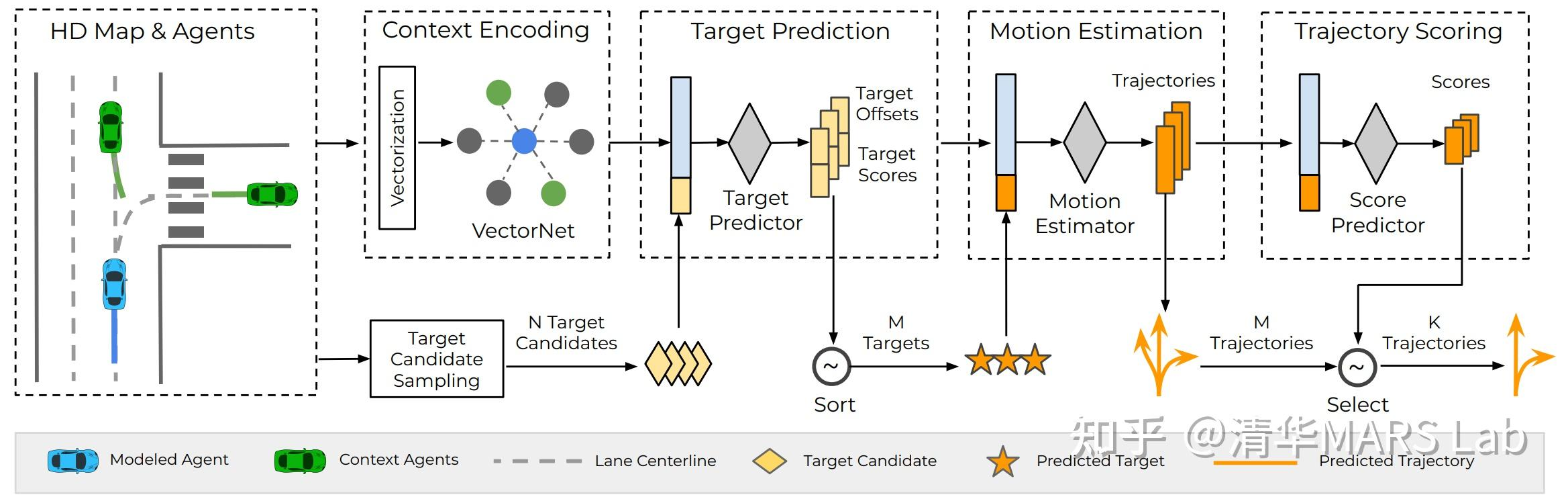
4.1 TNT
Target-driven Trajectory Prediction:TNT 是基于 VectorNet 對高精地圖和車輛動態進行編碼后,將軌跡預測問題轉化為終點預測問題。
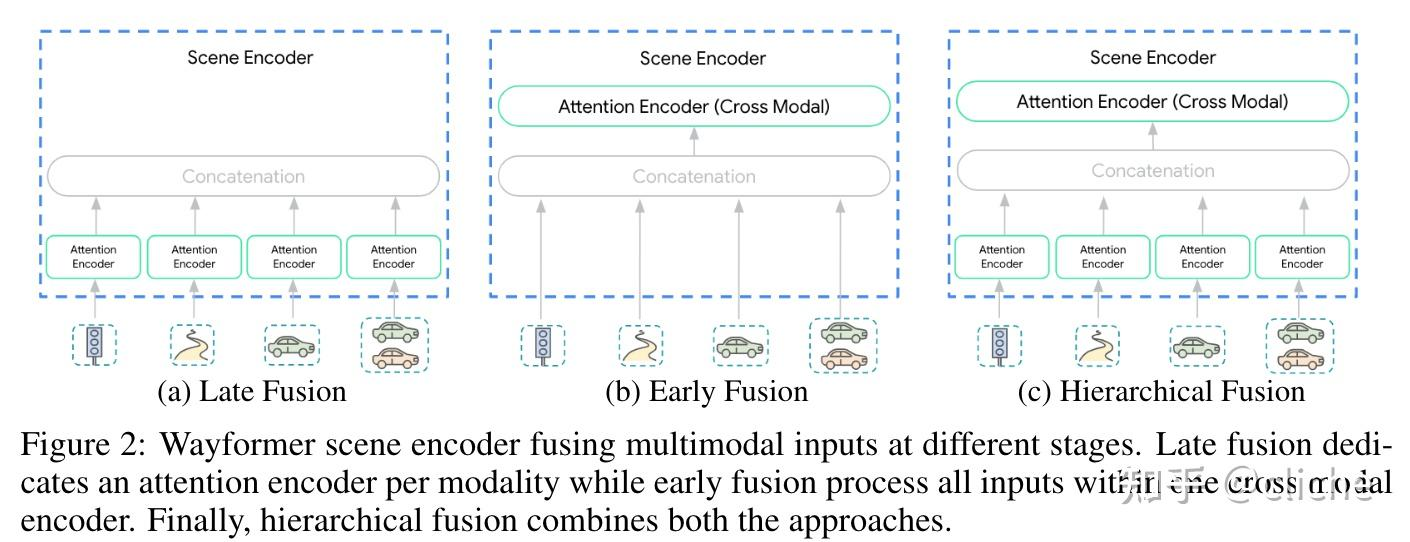
4.2 Wayformer
Motion Forecasting via Simple & Efficient Attention Networks:Wayformer 是一個基于注意力機制的運動預測架構,由基于注意力的場景編碼器和解碼器組成,研究了輸入模式的前融合、后融合和分層融合的選擇,通過分解注意力來權衡效率和質量。
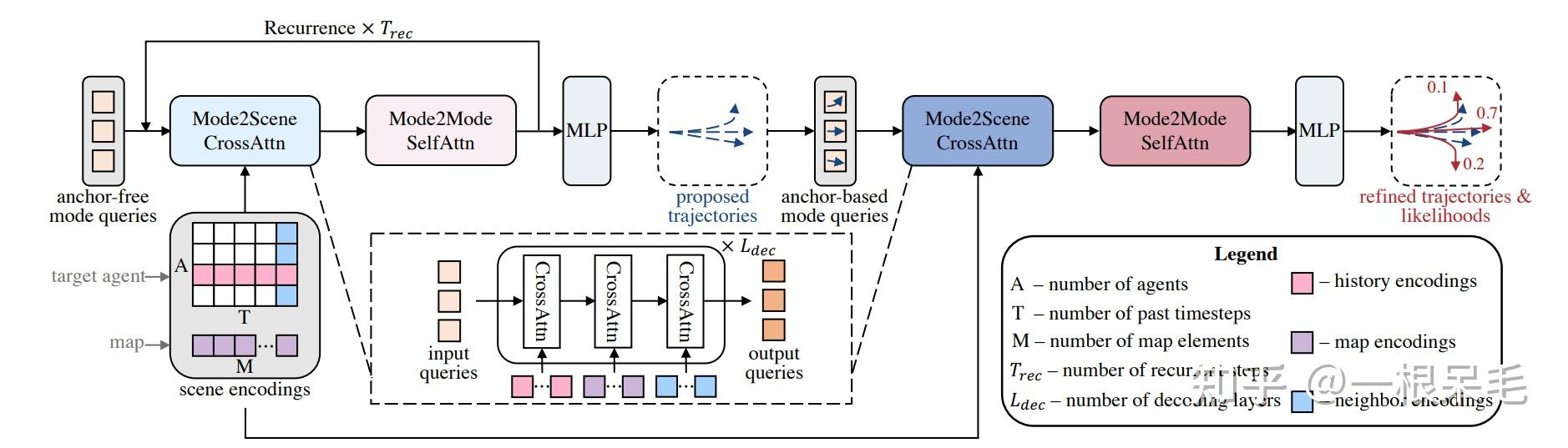
4.3 QCNet
Query-Centric Trajectory Prediction:QCNet 采用 query-centric 的框架,對場景進行編碼時可以重復使用已計算的結果,不依賴于全局的時空坐標系,同時不同 agent 共享場景特征,使得 agent 的軌跡解碼過程可以更加并行處理。
5.軌跡預測的評價指標
為了衡量軌跡預測模型的精度,通常采用以下指標,這些指標都是數值越小越好:
5.1 平均位移誤差
ADE(Average Displacement Error)計算所有時間步的預測軌跡點與真實軌跡點的歐幾里得距離均值,適用于評估軌跡預測的整體誤差。
5.2 最終位移誤差
FDE(Final Displacement Error)計算預測軌跡的終點與真實終點的歐幾里得距離,用于關注最終預測點的準確性。
5.3 最小平均位移誤差
minADE-K 選擇前 K 條預測軌跡中誤差最小的一條計算 ADE,衡量多模態預測的最優表現。
5.4 最小最終位移誤差
minFDE-K 選擇前 K 條預測軌跡中誤差最小的一條計算 FDE,關注終點預測的最優表現。
5.5 Miss Rate( MR)
計算 m 條軌跡中,有 n 條 FDE 超過 2m 的比例,用于衡量預測軌跡的整體可靠性。
6.未來發展趨勢
隨著自動駕駛技術的不斷發展,軌跡預測領域也呈現出新的發展趨勢:
感知預測融合 或 端到端
傳統方法將感知和預測作為兩個獨立模塊,而新一代模型正在探索聯合感知與預測,即直接在感知階段輸出未來軌跡,提高預測準確性。
采用端到端方法,從感知到控制一體化優化,提高系統整體性能。
*博客內容為網友個人發布,僅代表博主個人觀點,如有侵權請聯系工作人員刪除。