EEPW首頁(yè) >>
主題列表 >>
神經(jīng)網(wǎng)絡(luò)
神經(jīng)網(wǎng)絡(luò) 文章 進(jìn)入神經(jīng)網(wǎng)絡(luò)技術(shù)社區(qū)
基于模擬退火神經(jīng)網(wǎng)絡(luò)的I型FIR數(shù)字濾波器設(shè)計(jì)
- 摘要:提出一種基于模擬退火神經(jīng)網(wǎng)絡(luò)設(shè)計(jì)FIR數(shù)字濾波器的方法,是對(duì)用神經(jīng)網(wǎng)絡(luò)設(shè)計(jì)方法的一種改進(jìn)。由于線性相位FIR數(shù)字濾波器的幅頻特性是有限項(xiàng)的傅里葉級(jí)數(shù),因此構(gòu)造了一個(gè)三層余弦基神經(jīng)網(wǎng)絡(luò)模型,并用模擬退火
- 關(guān)鍵字: FIR 模擬退火 濾波器設(shè)計(jì) 神經(jīng)網(wǎng)絡(luò)
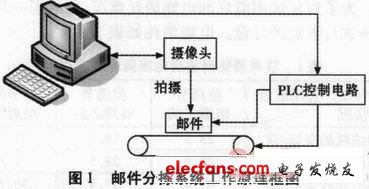
基于S7-200 PLC的模糊神經(jīng)網(wǎng)絡(luò)算法設(shè)計(jì)
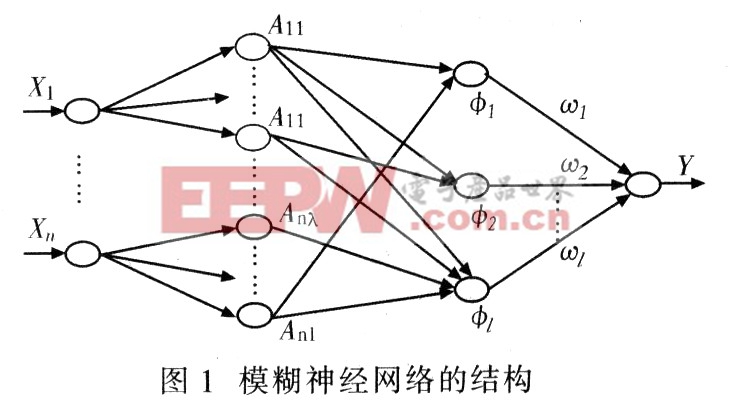
- 摘要:隨著智能信息技術(shù)的發(fā)展,模糊神經(jīng)網(wǎng)絡(luò)算法廣泛應(yīng)用于工業(yè)控制。但該算法尚未應(yīng)用于PLC。針對(duì)這種現(xiàn)狀,給出基于S7-200PLC的模糊神經(jīng)網(wǎng)絡(luò)算法設(shè)計(jì)。利用模糊神經(jīng)網(wǎng)絡(luò)算法的理論知識(shí),在S7-200的平臺(tái)上采用梯形
- 關(guān)鍵字: 算法 設(shè)計(jì) 神經(jīng)網(wǎng)絡(luò) 模糊 S7-200 PLC 基于
神經(jīng)網(wǎng)絡(luò)預(yù)測(cè)編碼器的設(shè)計(jì)及應(yīng)用
- 1 BP網(wǎng)絡(luò)結(jié)構(gòu)及其算法
反向傳播算法又稱誤差后向傳播算法(Error Back Propagation Algorithm),它是用來訓(xùn)練多層前饋網(wǎng)絡(luò)的一種學(xué)習(xí)算法。是一種有監(jiān)督的學(xué)習(xí)算法。通常稱用誤差反向傳播算法訓(xùn)練的網(wǎng)絡(luò)叫BP網(wǎng)絡(luò) - 關(guān)鍵字: 神經(jīng)網(wǎng)絡(luò) 編碼器
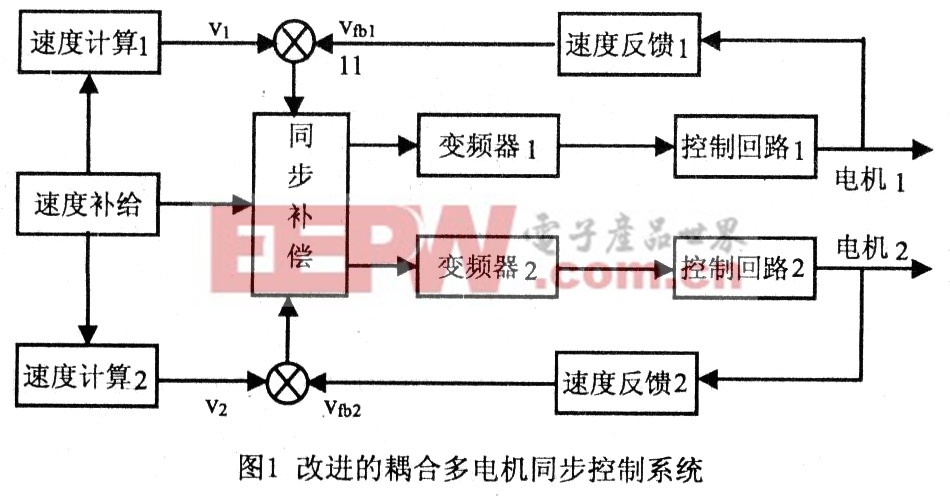
基于神經(jīng)網(wǎng)絡(luò)的多電機(jī)同步控制
- 1 引言
在造紙、印染、紡織等高精度、高轉(zhuǎn)速傳動(dòng)系統(tǒng)中,隨著工業(yè)自動(dòng)化程度的提高和生產(chǎn)規(guī)模的擴(kuò)大,采用單電機(jī)驅(qū)動(dòng)往往難以滿足生產(chǎn)的要求。而多電機(jī)同步控制歷來是最核心的問題,對(duì)多電機(jī)同步協(xié)調(diào)控制,國(guó)內(nèi) - 關(guān)鍵字: 控制 同步 電機(jī) 神經(jīng)網(wǎng)絡(luò) 基于 多電機(jī) 神經(jīng)網(wǎng)絡(luò) PID 同步控制 控制器
基于神經(jīng)網(wǎng)絡(luò)的微波均衡器建模與仿真
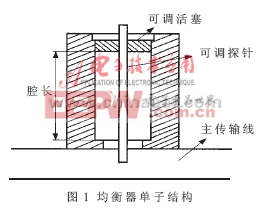
- 大功率行波管等微波管是雷達(dá)等電子裝備的核心器件,其技術(shù)水平?jīng)Q定了電子裝備的戰(zhàn)術(shù)性能。但是由于大功率微波管的增益波動(dòng)較大,在等激勵(lì)輸入的情況下,不能使頻帶內(nèi)所有點(diǎn)均達(dá)到飽和輸出,這樣會(huì)造成輸入信號(hào)產(chǎn)生諧
- 關(guān)鍵字: 建模 仿真 均衡器 微波 神經(jīng)網(wǎng)絡(luò) 基于 微波均衡器 人工神經(jīng)網(wǎng)絡(luò) RBF網(wǎng)絡(luò) 仿真
基于模糊神經(jīng)網(wǎng)絡(luò)的移動(dòng)機(jī)器人沿墻導(dǎo)航控制
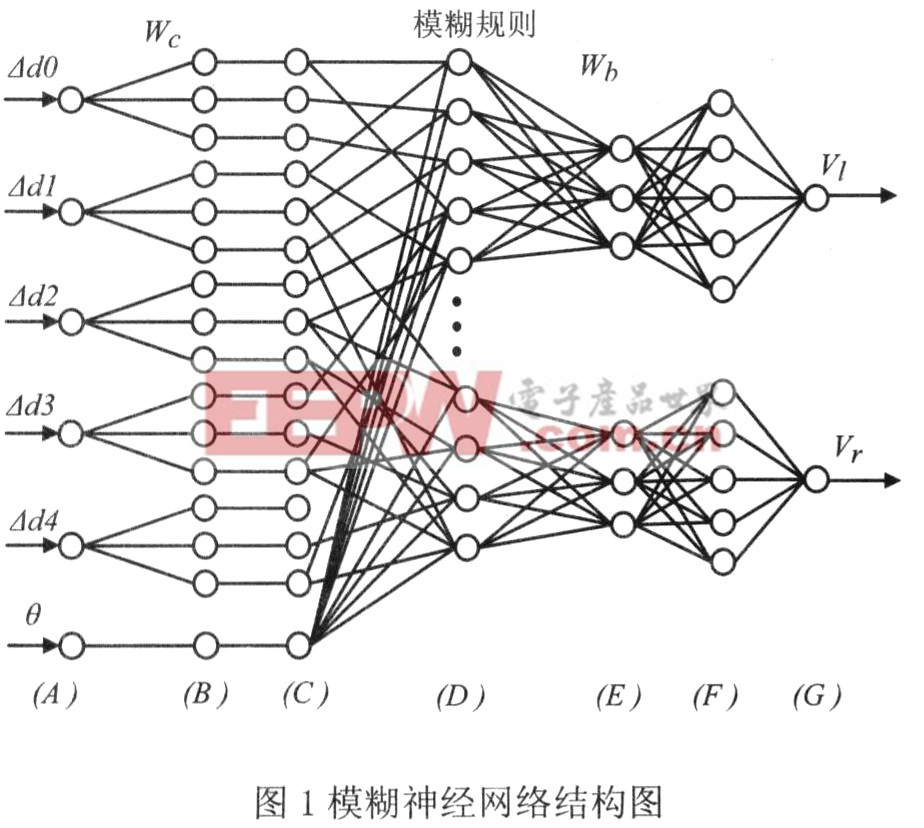
- 移動(dòng)機(jī)器人沿墻導(dǎo)航控制包含了追蹤和避障兩種情況,是移動(dòng)機(jī)器人研究中的常見問題。它是指機(jī)器人在一定方向上沿墻運(yùn)動(dòng),或者更一般意義上的沿著物體輪廓運(yùn)動(dòng),并與墻保持一定距離。移動(dòng)機(jī)器人利用聲納采集機(jī)器人與墻體的距離和角度信息,通過模糊神經(jīng)網(wǎng)絡(luò)將輸入數(shù)據(jù)進(jìn)行融合,從而判斷移動(dòng)機(jī)器人的位姿信息,輸出左右輪速度控制其動(dòng)作。實(shí)驗(yàn)證明此方法可以有效地保證移動(dòng)機(jī)器人在安全距離內(nèi)沿墻體運(yùn)動(dòng)。對(duì)比采用模糊神經(jīng)網(wǎng)絡(luò)前后的實(shí)驗(yàn),采用后的移動(dòng)機(jī)器人沿墻導(dǎo)航控制軌跡優(yōu)于采用前,均方誤差大大減小。
- 關(guān)鍵字: 導(dǎo)航 控制 機(jī)器人 移動(dòng) 模糊 神經(jīng)網(wǎng)絡(luò) 基于
基于神經(jīng)網(wǎng)絡(luò)的自適應(yīng)滑模逆控制器設(shè)計(jì)

- 1、引言 導(dǎo)彈的運(yùn)動(dòng)模型是一個(gè)十分復(fù)雜的非線性變參數(shù)模型。反饋線性化是一種重要的非線性控制方法,其基本思想是通過狀態(tài)變換,將一個(gè)非線性系統(tǒng)的動(dòng)態(tài)特性全部或部分變換成線性特性,從而用成熟的線性控制方
- 關(guān)鍵字: 控制器 設(shè)計(jì) 滑模 適應(yīng) 神經(jīng)網(wǎng)絡(luò) 基于
飛機(jī)剎車模糊神經(jīng)網(wǎng)絡(luò)DSP嵌入式控制系統(tǒng)
- 飛機(jī)剎車模糊神經(jīng)網(wǎng)絡(luò)DSP嵌入式控制系統(tǒng),飛機(jī)剎車系統(tǒng)是飛機(jī)上具有相對(duì)獨(dú)立功能的子系統(tǒng),承受飛機(jī)的動(dòng)、靜態(tài)載荷及著陸時(shí)的動(dòng)能,實(shí)現(xiàn)飛機(jī)的制動(dòng)控制。 從20世紀(jì)40年代至今,飛機(jī)剎車系統(tǒng)已發(fā)展到第四代。第一代飛機(jī)剎車系統(tǒng)由離合開關(guān)調(diào)節(jié)壓力來實(shí)現(xiàn)剎
- 關(guān)鍵字: 嵌入式 控制系統(tǒng) DSP 神經(jīng)網(wǎng)絡(luò) 剎車 模糊 飛機(jī) 數(shù)字信號(hào)處理 飛機(jī)剎車系統(tǒng) 神經(jīng)網(wǎng)絡(luò) 模糊控制 嵌入式
基于神經(jīng)網(wǎng)絡(luò)的電子鼻肺癌早期診斷系統(tǒng)
- 肺癌是目前全世界最常見的惡性腫瘤之一,其發(fā)病率和死亡率不斷上升。究其原因是肺癌病因不明,發(fā)病時(shí)間短、轉(zhuǎn)移快、惡性程度高,早期不易診斷,到中、晚期失去了手術(shù)機(jī)會(huì),患者五年生存率僅為15%左右。早期發(fā)現(xiàn)可使患者五年內(nèi)生存率提高到70%~80%。所以早期發(fā)現(xiàn)、早期診斷、早期治療是提高肺癌生存率和降低死亡率的關(guān)鍵。肺癌早期通常無特殊癥狀,幾乎不被醫(yī)生和病人警覺,并且常用診斷方法難以做到早期發(fā)現(xiàn)、早期定性診斷。 目前,基于電
- 關(guān)鍵字: 電子鼻 神經(jīng)網(wǎng)絡(luò) 模式識(shí)別 氣體傳感器陣列 呼吸氣體
基于神經(jīng)網(wǎng)絡(luò)電機(jī) 速度控制器的SOPC系統(tǒng)
- 針對(duì)機(jī)器人伺服控制系統(tǒng)高速度、高精度的要求,介紹一種全數(shù)字化的基于神經(jīng)網(wǎng)絡(luò)控制的直流電機(jī)速度伺服控制系統(tǒng)的設(shè)計(jì)方案。速度控制器采用BP網(wǎng)絡(luò)參數(shù)辨識(shí)自適應(yīng)控制,并將其在FPGA進(jìn)行硬件實(shí)現(xiàn);同時(shí)用Nios II軟核處理器作為上位機(jī),構(gòu)成一個(gè)完整的速度伺服控制器的片上可編程系統(tǒng)(SOPC)。實(shí)驗(yàn)結(jié)果表明,該控制系統(tǒng)具有較高的控制精度、較好的穩(wěn)定性和靈活性。
- 關(guān)鍵字: SOPC 系統(tǒng) 控制器 速度 神經(jīng)網(wǎng)絡(luò) 電機(jī) 基于 神經(jīng)網(wǎng)絡(luò) 伺服控制 現(xiàn)場(chǎng)可編程門陣列 Verilog HDL
基于CNN的海空目標(biāo)檢測(cè)
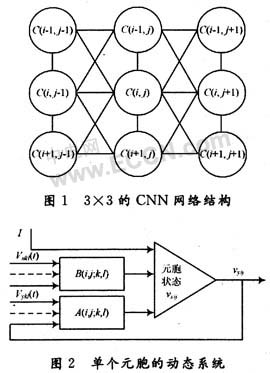
- 1 引 言 艦船航行在大海上,主要面臨來自空中,海面和水下的威脅,其中空中的威脅最大。這些目標(biāo)的主要特點(diǎn)是運(yùn)動(dòng)速度高,機(jī)動(dòng)頻繁,其背景也比較復(fù)雜,受云層、煙霧、波浪、飛鳥、山峰等影響較大。傳感器如熱像儀、電視攝像機(jī)、激光測(cè)距機(jī)等自身帶有噪聲,另外還會(huì)有各種形式的干擾,這些都給目標(biāo)的識(shí)別與跟蹤帶來很大困難。因此尋找一種能實(shí)時(shí)對(duì)圖像信號(hào)處理的、抗干擾的,并且適合大規(guī)模硬件開發(fā)與實(shí)現(xiàn)的算法是軍事界至今沒有完美解決的難題之一。 元(細(xì))胞神經(jīng)網(wǎng)絡(luò)(Cellular Neural Networks,
- 關(guān)鍵字: 檢測(cè) CNN 神經(jīng)網(wǎng)絡(luò) Matlab
RBF神經(jīng)網(wǎng)絡(luò)在紅外CO2傳感器壓力補(bǔ)償中的應(yīng)用研究

- 0 引 言 在目前種類繁多的CO2傳感器中,紅外光學(xué)式因?yàn)槠潴w積小、壽命長(zhǎng)、反應(yīng)快、精度高等優(yōu)點(diǎn),已經(jīng)成為CO2氣體分析最常用的方法,但因環(huán)境總壓的影響一直是這種分析方法中難以解決的主要問題之一,所以,它的適用范圍受到了很大的限制。在實(shí)際應(yīng)用中,此類傳感器通常都用在標(biāo)準(zhǔn)大氣壓環(huán)境中,其環(huán)境總壓基本保持恒定,不存在受總壓影響的情況。目前,一些精度較高的紅外CO2傳感器都通過采用壓力補(bǔ)償措施來保證分析測(cè)量精度,其中,比較簡(jiǎn)單常見的一種數(shù)學(xué)方法是利用最小二乘法對(duì)不同分壓值的CO2氣體由于環(huán)境總壓變化引
- 關(guān)鍵字: 傳感器 RBF 神經(jīng)網(wǎng)絡(luò) CO2 紅外 MATLAB
基于神經(jīng)網(wǎng)絡(luò)的電子鼻肺癌早期診斷系統(tǒng)
- 肺癌是目前全世界最常見的惡性腫瘤之一,其發(fā)病率和死亡率不斷上升。究其原因是肺癌病因不明,發(fā)病時(shí)間短、轉(zhuǎn)移快、惡性程度高,早期不易診斷,到中、晚期失去了手術(shù)機(jī)會(huì),患者五年生存率僅為15%左右。早期發(fā)現(xiàn)可使患者五年內(nèi)生存率提高到70%~80%。所以早期發(fā)現(xiàn)、早期診斷、早期治療是提高肺癌生存率和降低死亡率的關(guān)鍵。肺癌早期通常無特殊癥狀,幾乎不被醫(yī)生和病人警覺,并且常用診斷方法難以做到早期發(fā)現(xiàn)、早期定性診斷。 目前,基于電子鼻的疾病診斷研究主要集中在有關(guān)腎病、糖尿病的早期診斷和一些細(xì)菌的類型與生長(zhǎng)階段的
- 關(guān)鍵字: 醫(yī)療電子 電子鼻 神經(jīng)網(wǎng)絡(luò) 模式識(shí)別 氣體傳感器陣列 呼吸氣體
一種基于人工神經(jīng)網(wǎng)絡(luò)的遙感圖像去條帶方法
- 引言 紅外焦平面探測(cè)是一種兼具輻射敏感和信號(hào)處理功能的新一代紅外探測(cè)技術(shù),但是由于制造過程和工作環(huán)境的影響, 使得焦平面陣列(FPA ) 各個(gè)陣列元即使在相同的輻射通量照射下,也會(huì)輸出不相同的響應(yīng)電壓。這種紅外響應(yīng)引起的遙感圖像的失真被稱作紅外圖像的非均勻性。為了提高觀測(cè)頻率、掃描范圍和空間分辨率,航天遙感一般采用推掃式的多元敏感線陣列對(duì)地物成像,通過觀察發(fā)現(xiàn),推掃得到的遙感圖像出現(xiàn)有規(guī)律的條帶失真,條帶寬度與遙感器多元敏感元個(gè)數(shù)的掃描線寬度一致,而且隨著時(shí)間的推移,條帶現(xiàn)象日趨嚴(yán)重,與單敏感元掃描圖像
- 關(guān)鍵字: 測(cè)量 測(cè)試 紅外探測(cè) 神經(jīng)網(wǎng)絡(luò) 遙感圖像
神經(jīng)網(wǎng)絡(luò)介紹
您好,目前還沒有人創(chuàng)建詞條神經(jīng)網(wǎng)絡(luò)!
歡迎您創(chuàng)建該詞條,闡述對(duì)神經(jīng)網(wǎng)絡(luò)的理解,并與今后在此搜索神經(jīng)網(wǎng)絡(luò)的朋友們分享。 創(chuàng)建詞條
歡迎您創(chuàng)建該詞條,闡述對(duì)神經(jīng)網(wǎng)絡(luò)的理解,并與今后在此搜索神經(jīng)網(wǎng)絡(luò)的朋友們分享。 創(chuàng)建詞條
神經(jīng)網(wǎng)絡(luò)電路
神經(jīng)網(wǎng)絡(luò)相關(guān)帖子
神經(jīng)網(wǎng)絡(luò)資料下載
神經(jīng)網(wǎng)絡(luò)視頻

神經(jīng)網(wǎng)絡(luò)專欄文章
關(guān)于我們 -
廣告服務(wù) -
企業(yè)會(huì)員服務(wù) -
網(wǎng)站地圖 -
聯(lián)系我們 -
征稿 -
友情鏈接 -
手機(jī)EEPW
Copyright ?2000-2015 ELECTRONIC ENGINEERING & PRODUCT WORLD. All rights reserved.
《電子產(chǎn)品世界》雜志社 版權(quán)所有 北京東曉國(guó)際技術(shù)信息咨詢有限公司
 京ICP備12027778號(hào)-2 北京市公安局備案:1101082052 京公網(wǎng)安備11010802012473
京ICP備12027778號(hào)-2 北京市公安局備案:1101082052 京公網(wǎng)安備11010802012473
Copyright ?2000-2015 ELECTRONIC ENGINEERING & PRODUCT WORLD. All rights reserved.
《電子產(chǎn)品世界》雜志社 版權(quán)所有 北京東曉國(guó)際技術(shù)信息咨詢有限公司