工業機器人是指面向工業領域的多關節機械手或多個自由度的機器裝置,在工業生產加工過程中通過自動控制來代替人類執行某些單調、頻繁和重復的長時間作業。這些機器人可以對三個或三個以上軸進行編程,實現固定式或移動式的自動控制和可重復編程功能,可以用于工業生產過程中的搬運、焊接、裝配、加工、涂裝、清潔生產等方面。在《中國制造2025》中提出,機器人產業的發展要“圍繞汽車、機械、電子、危險品制造、國防軍工、化工、輕工等工業機器人應用以及醫療健康、家庭服務、教育娛樂等服務機器人應用的需求,積極研發新產品,促進機器人標準化
關鍵字:
202410 工業機器人 伺服電機
工業機器人是指面向工業領域的多關節機械手或多個自由度的機器裝置,在工業生產加工過程中通過自動控制來代替人類執行某些單調、頻繁和重復的長時間作業。這些機器人可以對三個或三個以上軸進行編程,實現固定式或移動式的自動控制和可重復編程功能,可以用于工業生產過程中的搬運、焊接、裝配、加工、涂裝、清潔生產等方面。在《中國制造2025》中提出,機器人產業的發展要“圍繞汽車、機械、電子、危險品制造、國防軍工、化工、輕工等工業機器人應用以及醫療健康、家庭服務、教育娛樂等服務機器人應用的需求,積極研發新產品,促進機器人標準化
關鍵字:
工業機器人 伺服電機
今天給大家分享的是:構建脈寬調制信號發生器脈寬調制(PWM)是一種利用數字信號精確控制模擬設備的技術。脈寬調制信號由用于模擬變化的模擬電壓的電子脈沖組成。脈寬調制信號通常用于控制伺服系統、LED和直流電機等模擬設備。一、脈寬調制的工作原理在脈沖寬度調制中,高頻電脈沖序列被發送到設備為其供電,脈沖可由驅動晶體管或功率MOS管生成。脈沖寬度調制信號出現在晶體管產生的高電壓和低電壓的周期中,信號從低電平循環到高電平所需的時間稱為周期持續時間。信號保持高電平的時間稱為脈沖寬度:脈沖寬度脈沖寬度與周期持續時間的比率
關鍵字:
脈寬調制信號發生器 PWM 伺服電機 直流電機
伺服電機控制方式有脈沖、模擬量和通訊控制這三種,在不同的應用場景下,該如何確定選擇伺服電機控制方式?01、伺服電機脈沖控制方式在一些小型單機設備,選用脈沖控制實現電機的定位,應該是最常見的應用方式,這種控制方式簡單,易于理解。基本的控制思路:脈沖總量確定電機位移,脈沖頻率確定電機速度。選用了脈沖來實現伺服電機的控制,翻開伺服電機的使用手冊,一般會有如下這樣的表格:都是脈沖控制,但是實現方式并不一樣:第一種,驅動器接收兩路(A、B路)高速脈沖,通過兩路脈沖的相位差,確定電機的旋轉方向。如上圖中,如果B相比A
關鍵字:
電機控制 伺服電機
FPGA適用于控制R / C伺服電機。 什么是遙控伺服器?R / C伺服(“遙控伺服電機”)由一個電機,一些電子設備和一組裝在一個小盒子中的齒輪組成。單軸從伺服器出來。您可以通過向伺服器發送脈沖來精確控制軸的旋轉角度。軸旋轉角度限制為大約270度(它不能旋轉一整圈,而只能旋轉3/4圈)。這是一個伺服器的圖片(已被咬住,但已說明了我們的目的)。有用的信息鏈接包括:RC伺服控制RC飛機伺服系統使用指南遙控伺服器101R / C Servos用于:在遙控模型中(汽車,飛機…)。在機器人技術中。電氣連接
關鍵字:
FPGA 伺服電機
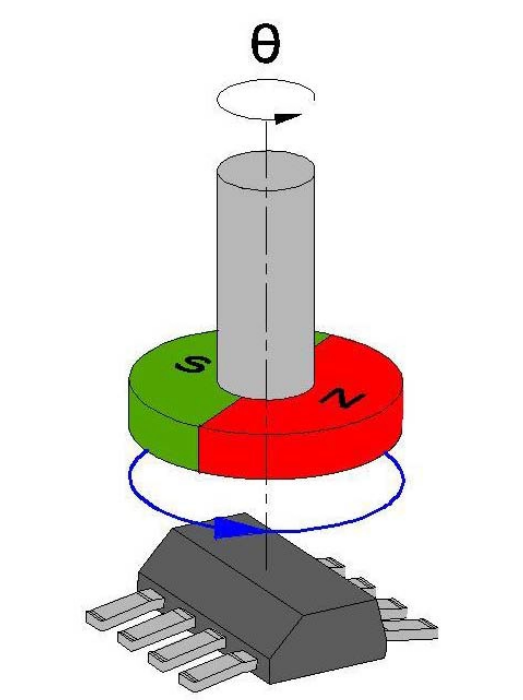
伺服電機編碼器是安裝在伺服電機上用來測量磁極位置和伺服電機轉角及轉速的一種傳感器,從物理介質的不同來分,伺服電機編碼器可以分為光電編碼器和磁電編碼器,另外旋轉變壓器也算一種特殊的伺服編碼器,市場上使用的基本上是光電編碼器,不過磁電編碼器作為后起之秀,有可靠,價格便宜,抗污染等特點,有趕超光電編碼器的趨勢。編碼器類型非常多,最常用的是絕對值編碼器、增量編碼器和旋轉變壓器,還有一些更高的通訊編碼器。對于伺服來講,要想獲得非常高的性能和精度,必須提高編碼器的分辨率,常用的伺服編碼器2000-2500線(脈沖數/
關鍵字:
Arrow 伺服電機 編碼器
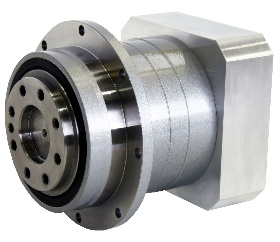
日本電產新寶就伺服電機用減速機“VR系列”推出了面向食品機械的產品陣容。近年來,隨著人們對食品中毒事件和諾如病毒等食品安全方面的關注度不斷增高,市場對食品機械(糖果糕點制造及面包制造機械、食品級肉類加工機械、包裝機械等)甚至其使用的減速機的安全需求也在不斷增加。在食品及藥品的制造環節,如攪拌、混合、粉碎、填充、搬運及對準等許多工序都導入了機器人及工廠自動化設備(FA),因此對所使用的減速機的安全要求也越來越高。面向食品機械的VR減速機為了滿足這樣的市場需求,日本電產新寶此次開發的、面向食品機械的VR減速機
關鍵字:
日本電產新寶 食品機械 伺服電機 減速機
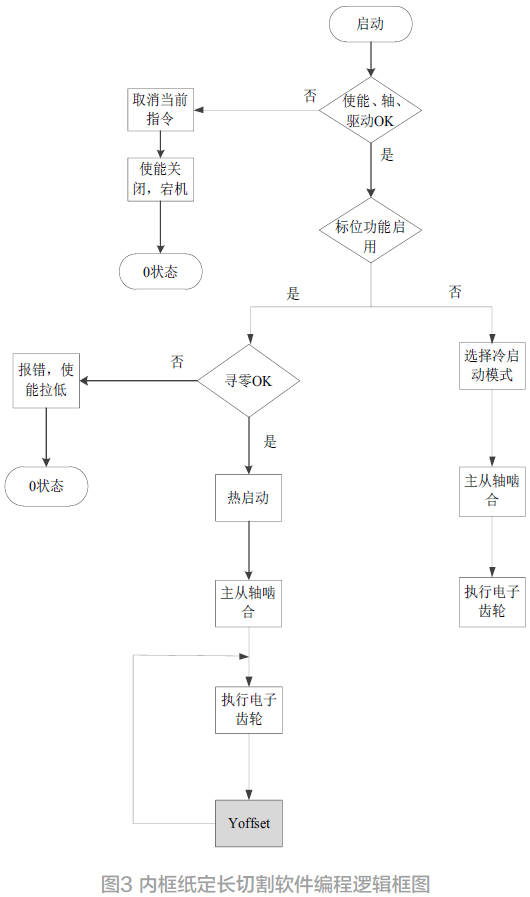
針對切換電子齒輪的定長切割無法及時對偏移量進行補償的問題,介紹了定長切割裝置的構成,介紹了傳統的伺服電機三環控制策略,提出了一種改進的基于電子齒輪的內框紙定長切割控制方法,優化后的定長切割方法可以實現當前周期對誤差進行補償,并在ZB48機組上進行了試驗,優化后的控制方法實現了更高的定長切割精度,大大減少了電機的跟隨誤差,提高了電機的運行穩定性。
關鍵字:
電子齒輪 定長切割 伺服電機 內框紙 202212
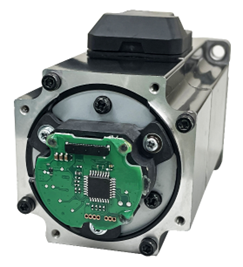
日本電產與日本電產三協共同研發出了一款搭載有 “Zignear?”的AC伺服電機 (分辨率:17bit) ,“Zignear?”是一種也可適用于工業機器人的、可替代編碼器的位置檢測技術。搭載有Zignear?的AC伺服電機【本產品的特征】l? 實現了與磁性編碼器相同的部件個數、與光學編碼器相同的位置檢測精度及隨動性。l? 位置檢測誤差的最高精度機械角小于±0.02°*。l? 可實現與傳統17bit‐AC伺服電機相同的動作 (通過搭載用于驅動無人搬運車 (AGV) 的系統測試來
關鍵字:
位置檢測 伺服電機
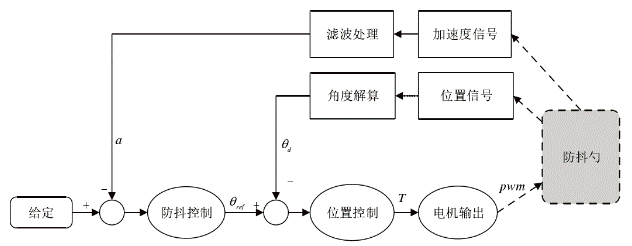
防抖叉勺的采取手柄和叉勺分離的設計,手柄與叉勺的主體的重心相平齊,且勺子主體延伸至手握部內,手柄的頂端通過轉動部與勺子主體相連接,轉動部為空心圓球結構,空心圓球內裝有一半的液體;在手柄內部安裝感應芯片,內置芯片會根據傳感器反饋的實時數據,利用了機器人平衡技術和高速伺服電機控制系統,會迅速做出反向運動以抵消患者手部的抖動。手柄設置為中空結構,勺子主體的周向設置有多根彈性件。本設計在重心位置設置平衡結構,從而保證人們手顫抖的時候,勺子主體不會發生抖動。
關鍵字:
202205 智能防抖 重心平衡 伺服電機
日本電產伺服株式會社正式推出搭載有Can-Bus通信功能的無刷直流電機。該電機主要用于自動售貨機的推貨機構。“搭載有Can-Bus通信功能的無刷直流電機”Can-Bus (Controller Area Network-Bus:控制器局域網總線技術) 是一種被稱之為車用總線標準的、使汽車、火車內部的組件相互連接的內部通信網絡。其特點是微控制器和設備無需主機即可相互通信。Can-Bus最初是為汽車內部的多路復用電氣配線設計的,被要求具有抗噪音性,現在被廣泛用于傳輸設備中的控制信息,也用于運輸設備、機床等機器
關鍵字:
日本電產 伺服電機 Can-Bus
全球連接和傳感領域的領先企業泰科電子(TE Connectivity,以下簡稱“TE”)攜其全新升級的智能工廠連接解決方案和創新技術亮相2019中國國際工業博覽會工業自動化展(2019 IAS),助力推進中國工業企業向數字化轉型。TE展臺位于上海虹橋國家會展中心, 6.1H館,F008號。在本次工博會上,TE以“助力工業數字化轉型”為主題,將TE圍繞數字化工廠的最新四大解決方案悉數展現給專業觀眾,其中包括“伺服電機連接解決方案”、“伺服及運動控制系統連接解決方案”、“工業機器人連接解決方案”和“控制柜解決
關鍵字:
智能工廠 伺服電機 連接
自2013年以來,我國已成為全球最大的機器人消費國,連續3年穩居世界工業機器人市場頭把交椅;與此同時,國產工業機器人產量也呈現出爆發式增長的趨勢。各地推動機器換人和自動化技術改造給工業機器人產業帶來了巨大市場,但是國產機器人關鍵零部件一直“受制于人”的現象卻始終沒有太大的突破。
關鍵字:
機器人 控制器 伺服電機
一聽到機器人行業,很多外行人會覺得這是一個能和IT、金融相提并論的新興高薪行業。特別是工業機器人各種關于收購、財報、融資、上市的事情層不出窮,每個月都能冒出幾家機器人公司,前撲后繼,頗有一種誰坐上了機器人行業的“早班車”,誰就半只腳邁上了人生巔峰之感。 那么事實真是這樣嗎? 機器人行業難道真如大家所說的那般高大上嗎? 開年之際,讓我們一起來仔細分析下工業機器人行業到底賺不賺錢? 機器人產業爆發的時代正加速到來 從大環境來看,根據IFR全球機器人發展報告,2017年全球機器人銷量增長30%,達
關鍵字:
工業機器人 伺服電機
我國工業機器人的三大核心零部件要想從本質上獲得突破,都需要付出更多的耐心和投入。
關鍵字:
機器人 伺服電機
伺服電機介紹
■定義: 在伺服系統中控制機械元件運轉的發動機.是一種補助馬達間接變速裝置。
■作用:伺服電機,可使控制速度,位置精度非常準確。將電壓信號轉化為轉矩和轉速以驅動控制對象
■分類:直流伺服電機和交流伺服電機。
直流伺服電機分為有刷和無刷電機。有刷電機成本低,結構簡單,啟動轉矩大,調速范圍寬,控制容易,需要維護,但維護方便(換碳刷),產生電磁干擾,對環境有要求。因此它可以用于對成 [
查看詳細 ]
關于我們 -
廣告服務 -
企業會員服務 -
網站地圖 -
聯系我們 -
征稿 -
友情鏈接 -
手機EEPW
Copyright ?2000-2015 ELECTRONIC ENGINEERING & PRODUCT WORLD. All rights reserved.
《電子產品世界》雜志社 版權所有 北京東曉國際技術信息咨詢有限公司
京ICP備12027778號-2 北京市公安局備案:1101082052 京公網安備11010802012473