R/C伺服電機FPGA

什么是遙控伺服器?
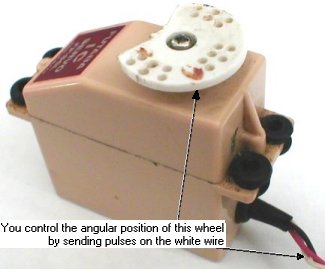
R / C伺服(“遙控伺服電機”)由一個電機,一些電子設備和一組裝在一個小盒子中的齒輪組成。單軸從伺服器出來。您可以通過向伺服器發送脈沖來精確控制軸的旋轉角度。軸旋轉角度限制為大約270度(它不能旋轉一整圈,而只能旋轉3/4圈)。
這是一個伺服器的圖片(已被咬住,但已說明了我們的目的)。
有用的信息鏈接包括:
R / C Servos用于:
電氣連接和PWM脈沖
伺服系統有3條線:
白線上的PWM控制脈沖長度需要在1ms到2ms之間。
1.5ms的脈沖使軸在其旋轉范圍的中間旋轉。
即使不需要更改角度位置,也需要定期發送新脈沖(每10到20ms),否則伺服將停止嘗試保持該脈沖。
來自FPGA的PWM脈沖
讓我們以8位分辨率(256步,從0到255)控制一個伺服器。這意味著我們需要產生一個1ms(0)到2ms(255)的脈沖,分辨率為1ms / 256 = 3.9μs。
分鐘
使用25MHz時鐘(周期為40ns),第一步是對時鐘進行分頻,以產生周期的“滴答聲”,使其盡可能接近3.9μs。
parameter ClkDiv = 98; // 25000000/1000/256 = 97.56 reg [6:0] ClkCount;reg ClkTick; always @(posedge clk) ClkTick <= (ClkCount==ClkDiv-2); always @(posedge clk) if(ClkTick) ClkCount <= 0; else ClkCount <= ClkCount + 1;
使用“ ClkTick”,我們實例化一個12位計數器,該計數器在每個滴答處遞增。
reg [11:0] PulseCount; always @(posedge clk) if(ClkTick) PulseCount <= PulseCount + 1;
每個滴答持續3.9μs,因此256個滴答持續1ms,12位計數器“ PulseCount”每16ms翻轉一次。正是我們需要定期產生新的脈沖。
產生PWM脈沖
當“ PulseCount”等于0時,我們開始每個脈沖。當“ PulseCount”
在256和511之間時,我們結束每個脈沖。這將在1ms和2ms之間產生脈沖。
假設“ RCServo_position”是8位位置值(從0到255),我們在其前面連接一個“ 0001”以創建一個范圍為256 ot 511的12位值。最后,我們將這12位與“ PulseCount”進行比較以產生脈沖。
reg RCServo_pulse;
always @(posedge clk) RCServo_pulse = (PulseCount < {4'b0001, RCServo_position});











評論