基于DSP的混合懸浮控制系統的硬件設計

引言
本文引用地址:http://www.j9360.com/article/91222.htm磁懸浮列車是依靠電磁吸力或電動斥力將列車車廂托起懸浮于空中并進行導向,實現列車與地面軌道間的無機械接觸,從根本上克服了傳統列車輪軌粘著限制、機械噪聲和磨損等問題,具有長壽命、無污染、無噪聲、能耗低、不受任何速度限制、安全可靠等優點。而電磁永磁混合懸浮系統可借助永磁體來產生大部分的懸浮力,從而可以減少懸浮系統的功耗,顯著降低懸浮電源的容量,并且懸浮氣隙可以適當增加,使得整個系統更加安全,軌道梁的造價也將下降。
傳統的數字控制器大多采用較高檔的單片機來實現復雜的計算和控制,但實時性變差,難以得到較好的動態性能。采用DSP控制,既可以保證計算和控制的實時性,又能充分發揮數字控制的諸多優點。
混合懸浮系統的數學模型
為了更方便地研究系統的數學模型,將該系統的物理模型簡化為圖1所示的形狀。
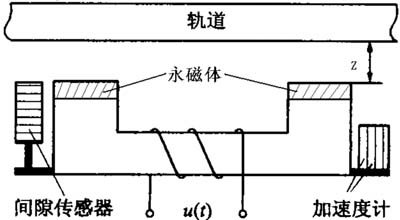
圖1 混合懸浮系統的分析模型
在進行系統數學模型分析之前首先做如下假設:忽略永磁體內部的漏磁通。
則混合懸浮系統電學和力學方程為:
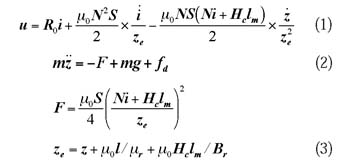
其中,為懸浮質量,為電磁力,為外部干擾力,和分別為電磁鐵電壓和電流,為電磁鐵線圈匝數,為線圈電阻,為有效磁面積,為等效氣隙,為實際懸浮氣隙,為真空磁導率,為鐵心磁導率,為磁路在鐵心和軌道中的總長度,為永磁體的剩余矯頑力,為永磁體的剩磁,為永磁體的厚度。
式(1)~(3)所得方程為非線性方程,難以精確求出方程解,若對方程進行平衡點附近線性化處理,可得:

其中, 和分別為電磁鐵電壓和電流相對平衡點的增量;表示氣隙變化單位值時,磁力的變化值;表示線圈電流變化單位值時,磁力的變化值;表示混合磁鐵在平衡點處的電感。
選取位移、速度和加速度為狀態變量,則系統狀態方程為:
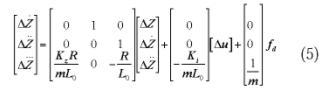
開環電磁永磁混合懸浮系統在工作點處線性化后的狀態空間表達式為:

其中,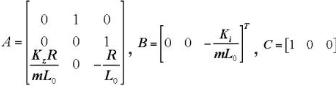
狀態向量取為: ,z為氣隙誤差。
,z為氣隙誤差。
懸浮控制器的硬件設計
要實現混合懸浮系統的穩定懸浮,必須根據電磁鐵的各種狀態對電磁鐵的電流進行調節,實際上這是通過改變電磁鐵的輸入電壓來實現的。混合懸浮系統的控制框圖如圖2所示。
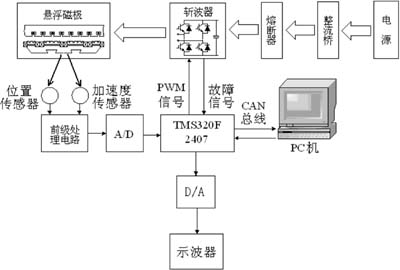
圖2 懸浮控制器的原理框圖
對懸浮控制的最基本要求是控制系統要具有快速響應、動態過程平穩、抗干擾好的性能特點,其中抗干擾性尤為重要。控制系統的實現可以全部采用模擬電路,也可以采用以數字電子計算機為核心的數字電路。模擬電路運算速度快,實時性好,但控制精度低、受外界環境影響大,且不易實現復雜的控制算法,調試困難。
DSP
DSP器件是一種特別適用于數字信號處理運算的微處理器,以DSP器件為核心的控制系統具有非常快的數據處理能力和良好的擴展能力,克服了模擬控制器和以單片機為核心的數字控制器的缺陷。本設計采用數字控制技術,控制電路的硬件包括:輸人信號的調理,信號、開關量的量化與采集,控制運算主電路及其輸出信號與其他器件信號之間的接口電路等。采用TI公司的最新產品TMS320LF240A DSP作為控制電路的中央計算電路,并且產生PWM波形輸出。
斬波器
懸浮控制要求反映動作快,為減小斬波器所具有的滯后性,要求所選用的斬波器具有較高的輸出電流變化率且安全可靠。考慮到流過磁極的電流有兩種相反的方向,因此懸浮磁極的驅動斬波器選用全橋斬波器——H型斬波器。其拓撲結構如圖3所示,擬采用兩電平調制,即開關T1和T3的開關信號相同而開關T2和T4的開關信號相同,為避免直流貫通,T1(T3)的開關信號與T2(T4)的開關信號之間有適當的死區。
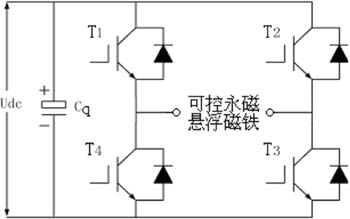
圖3 懸浮斬波器的拓撲結構
前級處理電路
前級處理電路其主要功能是完成傳感器信號的放大,與基準信號的比較,以及信號的轉換,濾波。由于沒有采用速度傳感器,而通過軟件方法獲得的信號又不能令人滿意,可設計對氣隙信號進行微分處理的微分電路,如圖4所示。
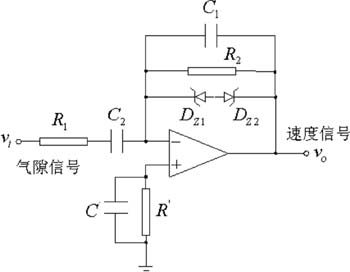
圖4 微分電路
此電路的輸入與輸出關系為:
A/D轉換電路
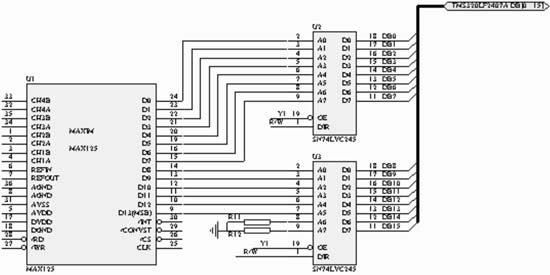
A/D轉換電路實現采樣保持和A/D轉換兩種功能,它是在TMS320LF2407A微處理器控制下完成操作的。本文采用MAX125芯片實現這一部分功能。
根據MAX125接口電路的特點,設計如圖5所示與TMS320LF2407A的接口電路。
圖5 MAX125和TMS320LF2407A的接口電路
D/A轉換電路
D/A轉換電路選用TI公司的高性能D/A轉換器TLC7225,它片內包含四路8位電壓輸出數/模轉換器(DAC),每個DAC都有分離的片內鎖存器。數據通過一個公共的8位TTL/CMOS兼容(5V)輸入口送入這些數據寄存器之一。
實驗結果
混合懸浮系統的參數如下所示:


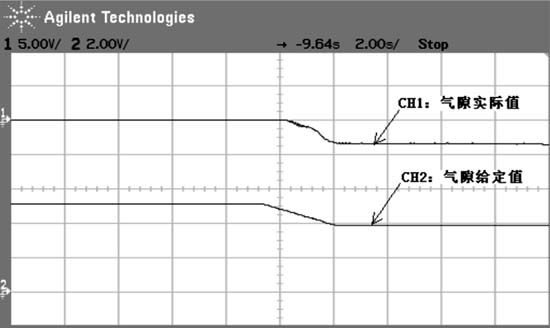
圖6為懸浮系統慢浮起過程的示波器記錄。混合懸浮系統初始機械氣隙為0.02m,穩定懸浮機械氣隙為0.015m。
X軸:2.00s/div;一通道Y軸:2.00V/div;二通道Y軸:1.00V/div
圖6 混合懸浮系統慢起浮氣隙實驗結果
圖7給出了混合懸浮系統慢起浮電流的實驗結果。
X軸:2.00s/div;Y軸:2.00V/div 電流鉗:100mV/A
圖7 混合懸浮系統慢起浮電流實驗結果
實驗結果表明該硬件設計能夠實現電磁鐵的穩定懸浮。
結論
與傳統的純電磁懸浮系統相比,電磁和永磁組成的混合懸浮系統在相同懸浮功率的情況下可實現大氣隙懸浮,即可達到20mm左右的懸浮氣隙,這可降低車載蓄電池容量和重量,降低列車的自重,增加有效載荷,因而可以降低軌道精度要求,從而降低軌道工程造價。該系統采用以TMS320LF2407A為核心的懸浮控制電路,具有非常快的數據處理能力,克服了模擬控制器和以單片機為核心的數字控制器的缺陷。通過實驗實現了系統的穩定懸浮,驗證了設計的合理性。
參考文獻:
[1]Liming Shi, Zhengguo Xu, Nengqiang Jin, Shaohui Xu. Decoupled Control for the Hybrid-Magnets used in Maglev System with Large Air-gap. LDIA2003:267-270.
[2] Zhengguo Xu, Nengqiang Jin,Liming Shi and Shaohui Xu. Maglev System with Hybrid-excited Magnets and an Air-gap Length Control. Maglev 2004:1019-1023.
[3]Kinjiro Yoshida, Ju-Lee. 3-D FEM Field Analysis in Controlled-PM LSM for Maglev Vehicle[J].IEEE.Trans. 1997,33(2):2207-2210.
[4] Mir Behrad Khamesee, Norihiko Kato, Yoshihiko Nomura. Design and control of a microrobotic system using magnetic levitation [J]. IEEE.Trans. 2002,7(1):1-14.
[5] Kinjiro Yoshida, Testnao Umino. Dynamics of the propulsion and levitation systems in the controlled-PM LSM maglev vehicle[J]. IEEE.Trans. 1987,MAG-23(5):2353-2355.











評論