基于CAN現場總線的時間信息共享技術研究

引言
本文引用地址:http://www.j9360.com/article/81703.htm電子時間引信系統從火控計算單元提取的射彈飛行時間數據需要實時可靠地傳送給編程裝置,為保證時間信息傳送的準確、及時,我們采用了CAN總線進行時間信息的傳輸。CAN總線具有突出的可靠性和實時性,適合在復雜的戰場環境下工作,基于CAN現場總線的時間信息數據接口,可充分保證時間信息傳送,并為電子時間引信系統提供標準的數據接口,便于應用在其它防空武器系統的嵌入式改造或未來數字化防空武器系統中。
CAN現場總線概述
CAN(Controller Area Network)總線誕生和發展于汽車工業自動控制領域,是兩線制“多主對等”總線型拓撲網絡,能有效地支持具有很高安全等級的分布實時控制,是唯一有國際標準的現場總線(Field Bus),目前發展到CAN2.0B規范,應用范圍極為廣泛。
CAN總線用“顯性(Dominant)”和“隱性(Recessive)”兩個互補的邏輯值表示“0”和“1”,總線接口上同時發送顯性和隱性位時,總線值是顯性,實現邏輯與。CAN總線的位速率與其傳輸距離有關,傳輸距離在40m以內速率最大可達1Mbps,最大傳輸距離10km上的位速率為5kbps。根據ISO/OSI參考模型,CAN的層次劃分為:(1)數據鏈路層(Data Link Layer),包括邏輯鏈路控制子層(LLC)和介質訪問控制子層(MAC);(2)物理層(Physical Layer)。
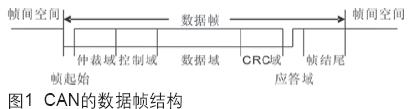
CAN總線的信息以幾個不同的固定格式的報文發送,報文傳輸有四種不同類型的幀:數據幀(Data Frame)、遠程幀(Remote Frame)、錯誤幀(Error Frame)和過載幀(Overload Frame),數據幀和遠程幀可以使用標準幀和擴展幀2種不同格式,不同之處在于標識符域的長度分別為11位和29位。CAN的幀(Frame)由不同的位域(Bit Field)組成,以最重要的數據幀為例介紹幀的結構,數據幀包括7個不同的位域:幀起始、仲裁域、控制域、數據域、CRC域、應答域和幀結尾(如圖1所示)。
為了獲得最安全的數據發送,CAN總線采取強有力的措施來進行錯誤檢測和處理。報文傳輸過程中有5種錯誤類型:位錯誤、填充錯誤、CRC錯誤、格式錯誤和應答錯誤,對于故障的界定有3種狀態:“錯誤激活”、“錯誤認可”和“總線關閉”。
智能節點接口技術
CAN總線采用總線型網絡拓撲,實際應用中也可采用具有支線的“樹型拓撲”。節點是CAN網絡上信息的起點和終點,智能節點是指具有微處理器的節點,它在可靠性、兼容性、信息處理能力等方面具有優勢。
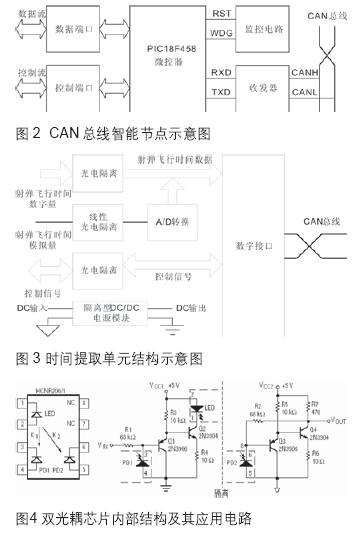
智能節點硬件設計包括CAN控制芯片與MCU的連接和CAN控制芯片與PC機的連接。典型的智能節點結構為“MCU+CAN控制器+CAN驅動器”,具有CAN模塊的微控制器(MCU)將前2者合二為一,如PIC18F458、MC68HC908GZ16、P8Xc591,操作使用更加方便。PC機上的智能節點設計多采用CAN適配卡,由ISA接口、雙口RAM、嵌入式微處理器、CAN控制器、CAN驅動器組成。
智能節點軟件設計的核心內容為CAN節點初始化、報文發送和報文接收,還包括CAN總線錯誤處理、總線關閉處理、接收濾波處理、波特率參數設置和自動檢測以及CAN總線通信距離和節點數的計算。
采用PIC18F458微控制器設計的智能節點如圖2所示。
時間提取單元和編程裝置的設計實現
時間提取單元和編程裝置是電子時間引信系統的重要組成部分,兩者協調工作完成射彈飛行時間的隔離提取、數據共享和編碼發送,設計實現上采用“功能電路+數字接口”的方案,作為節點連接在CAN總線上。兩者的機械結構設計要充分考慮與現有武器裝備的機械兼容性和電磁兼容性,不能影響現有裝備的結構和工作狀態。
時間提取單元的設計實現
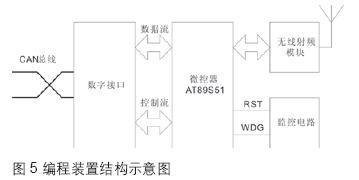
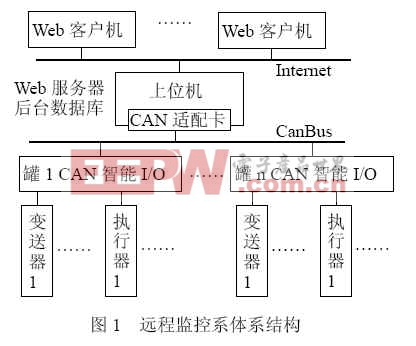
時間提取單元的任務功能是從武器系統火控計算單元中提取射彈飛行時間,并將其發送到CAN總線上。其電路結構如圖3所示,主要由射彈飛行時間數字量隔離提取電路、射彈飛行時間模擬量隔離提取電路、A/D轉換電路、控制信號(開關量)隔離采集電路、數字接口、隔離型DC/DC電源模塊等部份組成,可以提取16位的射彈飛行時間數字量或1路射彈飛行時間模擬量、8位控制信號,輸出為CAN總線信號,使用雙絞線在1km的范圍內得到高達70kbps的傳輸速率。光電隔離電路采用雙光耦構成電流串聯負反饋電路實現模擬信號的線性隔離傳輸,即用兩個相同型號的光耦輸入端串聯,組成差分負反饋,來補償光耦的非線性電流傳輸系數,通常使用雙光耦芯片可以得到較好的一致性,使電路傳輸特性更好。典型的雙光耦芯片(如HCNR200)內部結構及其應用電路如圖4所示。A/D轉換使用ADC0809芯片完成,隔離型DC/DC電壓變換器選用愛立信的電源模塊PKV3211PI,其輸入電壓范圍為9V~36V,輸出電壓5V,輸出功率2.5W,模塊化設計,小體積磚形封裝,可以滿足要求。
視火控計算單元和提取位置的不同,時間提取單元的機械結構設計可采用轉接頭或總線卡等的不同形式。對于向量式瞄準具,將時間提取單元電路板與射彈飛行時間求取電路板通過接插件直接連接,共同放置于安裝盒內;從火控計算單元內部連接件上提取數據時,使用相同型號的連接件(包括公頭和母頭)作為附加裝置,內部將兩端對應位置連線,從連線上提取所需數據信號給光耦電路;火控計算機數據總線提取數據,將電路設計成接口卡的形式,直接插在計算機主板空余的插槽上。
編程裝置的設計實現
編程裝置的任務功能是從CAN總線上獲取射彈飛行時間數據,進行數據編碼,并通過射頻模塊轉換為射頻信號發送。其電路結構如圖5所示,由數字接口、微控制器、無線射頻模塊和監控電路組成。微控制器AT89S51為電路的核心,完成數據接收、數據編碼、射頻模塊控制、數據串行發送等諸多功能,大大簡化了電路結構;監控電路采用X25045,監控微控制器的工作狀態,防止程序“跑飛”;數字接口與時間提取單元相同;無線射頻模塊采用原廠提供的標準電路板(設置為發送狀態),其天線為腐蝕在PCB板上的銅線,在天線外2~20m的范圍形成射頻編程窗口。
編程裝置電路板安裝在長方體形盒里,外部通過接插件分別與CAN總線(兩芯插頭和插座)和無線射頻模塊(7芯的插頭和插座)相連接。整個編程裝置盒固定于火炮炮箱上方,距炮口約2.5m的位置,且將射頻模塊PCB板有天線一側朝向管身方向,以便獲得較好的射頻性能。
參考文獻:
1 鄔寬明.CAN總線原理和應用系統設計. 北京:北京航空航天出版社,1996.
2 徐愛鈞,彭秀華.單片機高級語言C51應用程序.設計[M]..北京:電子工業出版社,2000.
3 饒運濤.現場總線CAN原理及應用技術. 北京:航空航天大學出版社,2003.
4 陳艷峰等. 實用線性光電隔離放大電路分析研究. 單片機應用技術選編(8)

評論