CAN現場總線在電動汽車控制系統中的應用

CAN現場總線是20世紀80年代初德國BOSCH(博世)公司在為解決汽車中眾多的控制與測試儀器之間的數據交換而開發的一種通信協議。由于CAN總線具有突出的可靠性、實時性和靈活性,因而得到了業界的廣泛認同和運用,并在1993年正式成為國際標準和行業標準,被譽為“最有前途的現場總線”之一。以CAN為代表的總線技術在汽車上的應用不但減少了車身線束,也提高了汽車的可靠性。在國外現代轎車的設計中,CAN已經成為必須采用的技術,奔馳、寶馬、大眾、沃爾沃及雷諾等汽車都將CAN作為控制器聯網的手段。我國目前CAN總線技術在汽車上的應用存在著很大的空白,在電動汽車上應用CAN總線技術研究尚處于起步階段。
電動汽車融合了許多的電子控制系統,如電池管理系統、電機控制系統、驅動控制系統、再生制動系統及ABS系統等。電子設備的大量應用,必然導致車身布線增長且復雜、運行可靠性降低、線路上的功率損耗加大、故障維修難度增大。特別是電子控制單元的大量引入,為了提高信號的利用率,要求大批的數據信息能在不同的電子單元*享,汽車綜合控制系統中大量的控制信號也需要實時交換,傳統線束已遠遠不能滿足這種需求。將CAN總線技術引入電動汽車可以克服以上缺點,具有廣闊的應用前景。文中將CAN總線技術應用到電動汽車控制系統,并采用通用擴展單元解決電動汽車電控系統的電路設計復雜性的問題,優化組合各電控單元信息以實現充分信息共享,達到提高電動汽車控制系統性能的目的。
二、CAN總線的特點
CAN屬于現場總線范疇,是一種有效支持分布式控制或實時控制的串行通信網絡。CAN總線在工業控制領域廣泛應用得益于其自身的技術特點。
(1)只需通過報文濾波即可實現點對點、一點對多點及全局廣播等幾種方式傳送接收數據,無須專門的“調度”。
(2)通信方式靈活。CAN為多主方式工作,網絡上任一節點均可在任意時刻主動地向網絡上其他節點發送信息,而不分主從且無須站點地址等節點信息。
(3)CAN采用非破壞性總線仲裁技術,當多個節點同時向總線發送信息時,優先級較低的節點會主動地退出發送,而最高優先級的節點可不受影響地繼續傳輸數據,從而大大節省了總線沖突仲裁時間,尤其在網絡負載很重的情況下也不會出現網絡癱瘓情況。
(4)采用短幀格式通信,傳輸時間短,受干擾概率低,具有極好的檢錯效果。每幀字節數最多8個,可滿足通常工業領域中控制命令、工作狀態及測試數據的一般要求。同時,8B也不會占用過長的總線時間,從而保證了通信的實時性。
(5)CAN的每幀信息都有CRC校驗及其他檢錯措施,保證了數據通信的可靠性。
三、CAN總線在電動汽車上的應用
CAN總線應用于電動汽車上具有以下優點。
(1)減少各功能模塊所需的線束數量和體積。
(2)減少整車質量并降低汽車成本,具有較高的數據傳輸可靠性和安裝便捷性,擴展了汽車功能。
(3)一些數據如車速、電機轉速和SOC等能夠在總線上共享,因此去除了冗余的傳感器,使傳感器信號線減至最少,控制單元可做到高速數據傳輸。
(4)可以通過增加節點來擴展功能,如果數據擴展增加新的信息,只需升級軟件即可。
(5)實時監測并糾正由電磁干擾引起的傳輸錯誤,并在檢測到故障后存儲故障碼。
目前存在的多種汽車網絡標準,其側重的功能有所不同,為方便研究和設計應用,SAE車輛網絡委員會將汽車數據傳輸網劃分為A、B、C3類。
A類面向傳感器/執行器控制的低速網絡,數據傳輸位速率通常只有1~10kb/s。主要應用于電動門窗、座椅調節和燈光照明等控制。
B類面向獨立模塊間數據共享的中速網絡,位速率一般為10~100kb/s。主要應用于電子車輛信息中心、故障診斷、儀表顯示和安全氣囊等系統,以減少冗余的傳感器和其它電子部件。
C類面向高速、實時閉環控制的多路傳輸網,最高位速率可達1Mb/s,主要用于懸架控制、牽引控制、先進發動機控制和ABS等系統,以簡化分布式控制和進一步減少車身線束。到目前為止,滿足C類網要求的汽車控制局域網只有CAN協議。
四、方案設計
1. 系統原理圖
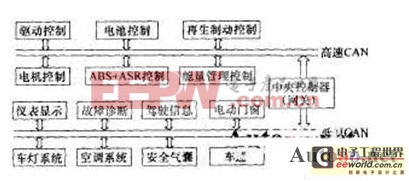
圖1為電動汽車CAN總線控制系統原理圖











評論