一種基于PSoC的電動自行車控制器的設計(上)

硬件結構
本文引用地址:http://www.j9360.com/article/81323.htmCypress的可編程片上系統(PSoC)由于其獨特的SoC架構而給客戶提供十分靈活的設計方便性。PSoC的特點是將8位微處理器核和通用的數字邏輯模塊以及模擬模塊資源集成在同一器件上,同時為了連接這些不同模塊,內部有豐富的連線資源。這些內部連線資源可以用于內部模塊的互聯,也同樣被應用到內部模塊到外部I/O的連接。輸出總線上的邏輯查找表(LUT)可實現和外部的控制信號之間的無縫連接。通用模擬模塊和數字模塊可以根據客戶的實際需要獨立或者組合配置成相應的應用模塊,例如定時器,Delta-Sigma ADC,濾波器等。
為了降低控制器的成本,很多設計中采用一些低端的微處理器,這些微處理器一般只有一路的PWM輸出,為了控制BLDC電機運行,需要微處理器外圍上擴展一些數字邏輯器件以擴充PWM輸出通道。同時為了檢測電壓、電流等其他模擬信號,還需要增加一些外圍的信號調理電路。 這些都增加控制器上的元器件數目,并使PCB布線更加復雜。如果需要實現一些高級的電機控制,例如,ABS輔助剎車時PWM載波方式的靈活控制、同步續流等,還需要增加額外的數字電路。這樣的設計總體成本實際上比采用高性能的微處理器的設計更高,并且增加了系統故障可能性。
因為在電動自行車設計中具有許多鮮明的特點,CY8C24423目前已被市場廣泛接受。為了更好的滿足客戶的需求,Cypress在CY8C24423的基礎上推出了CY8C24x33系列產品以更好的服務于電動自行車設計。同時,Cypress也推出基于CY8C24x33的電動自行車評估方案以縮短客戶的開發時間。
圖1是基于CY8C24x33的電動自行車應用框圖。圖中紅色框內代表Cypess新型混合信號控制器(PSoC),以外的區域是控制板上其他電路模塊。從圖中可以看出,PSoC內部集成了實現電動自行車控制器所需要的數字及模擬資源如:脈寬調制器(PWM)、增益可編程運放(PGA)、比較器(CMP)、模數轉換器(A/D)以及框圖內沒有具體標示的數字邏輯電路和布線資源。其中A/D部分,相較于之前的CY8C24423,CY8C24x33內部除了可以用數字和模擬模塊組合出delta-sigma ADC外,用戶還可以選用其內部集成的8位SAR ADC,其最高速度可以達到300Ksps,完全可滿足電動自行車中對電流高速采樣的要求。另外,CY8C24x33內部集成的FLASH 空間也擴展到了8K字節,以滿足電動自行車設計越來越復雜的設計。
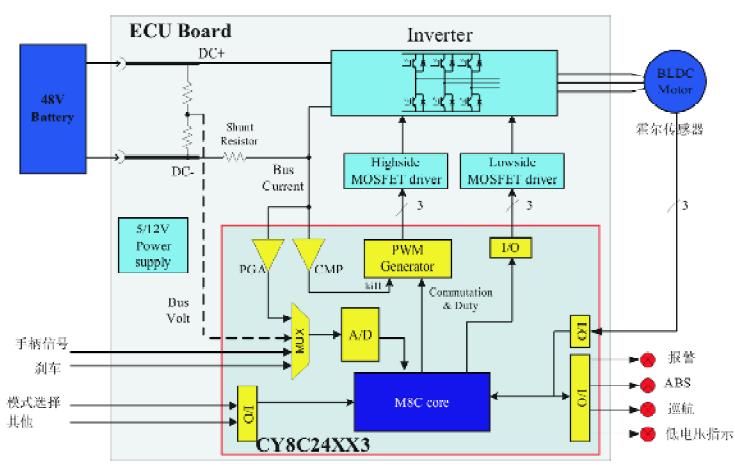
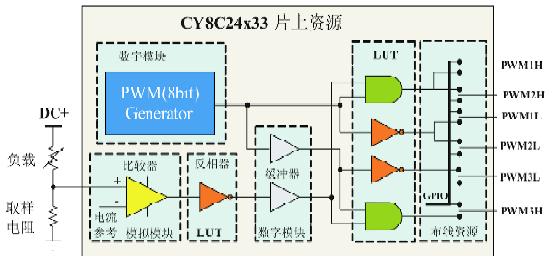
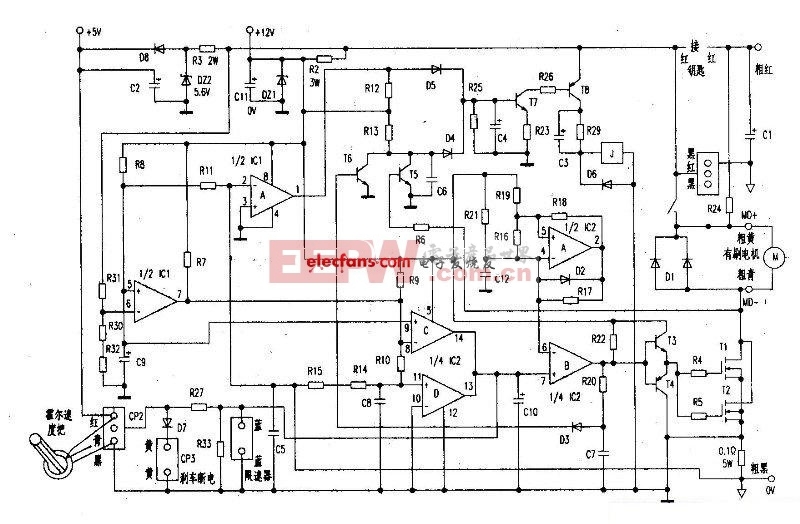
圖2中還顯示了該方案的過流檢測和保護的實現。在電機設計中,過流保護非常重要。過大的電流將在很短的時間內損壞開關管,只有采用硬件保護方式才能有快速的反應時間,并及時關閉開關器件。該保護電路包括過流檢測和PWM輸出封鎖電路,全部由PSoC的片上資源配置而實現的。從圖中可看出,電流取樣電阻上的電壓輸入到比較器的同相端,而比較器的反相端接到電流的參考值。比較器的輸出經過反相器和緩沖器輸入到輸出總線的LUT上的與門,以控制上橋臂的PWM輸出。正常工作時候(小電流時),電流取樣電阻上的電壓比比較器反相端的參考電壓低,因此比較器輸出為低電平,經過反相器后為高電平,使得LUT中的與門開啟,PWM可輸出到引腳上。而當過流時,LUT的與門一端輸入為低電平,從而關閉了PWM的輸出。同時,比較器將產生硬件中斷以通知程序進行相應處理。PSoC的比較器反相端電壓參考值可根據具體需要進行設置,從而可以在程序中非常方便的調整峰值保護電流的閥值。
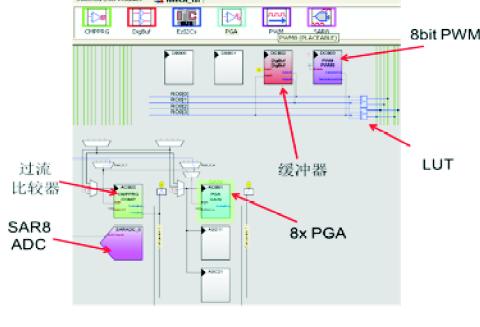
圖3是該設計在PSoC Designer開發環境下的內部資源配置圖。除了前面所描述的PWM輸出,過流檢測和保護電路外,還包括一個PGA用于放大輸入的電流采樣信號以及SAR8 ADC。
以上所述可以看出,基于PSoC的電動自行車控制器的硬件設計非常簡潔。其內部所有的數字和模擬資源都可以動態配置,I/O內部連線也可以隨時改動,既提高了系統的集成度,也增加了系統保密性,并且具有高度的靈活性。原先很多PCB布局布線工作,現在可以放在軟件集成環境中,有芯片內部連線完成,可以大大縮短設計周期。
軟件設計
目前電動車市場的系統方案日趨成熟,各個方案相似程度較高。如果就功能來說,大多是一些基本功能的組合。這些基本功能主要包括:無級調速;低壓檢測;系統顯示/人機界面;電機堵轉保護/過流保護;電機缺相位檢測;自動巡航;電子剎車/滑行充電;防盜報警;1:1助力。
以上這些基本功能,可以被分成兩大類,一類是行駛功能,第二類是保護功能。行駛功能中的重點就是BLDC電機的控制。保護功能中的重點包括對人的保護如剎車,以及針對車的保護如過流保護,堵轉保護等。因為剎車技術內部涵蓋了諸如電流的調理,信號的檢測以及功率系統的PWM驅動等內容,這里著重對電動自行車的剎車進行深入的介紹。
BLDC電機控制
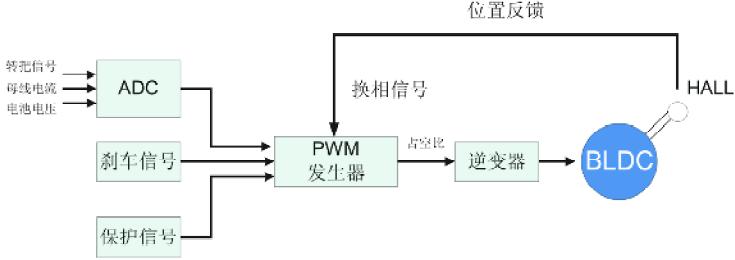
帶傳感器的BLDC的電機控制原理較簡單,配合霍爾傳感器的信號,產生合適的控制輸出序列,可以驅動電機旋轉。在電機旋轉的基礎上,如果我們在六拍控制信號中引入PWM,即可以實現調速功能。電動自行車的BLDC電機控制與通常的帶傳感器的BLDC電機控制沒有太大的區別,只是在電動自行車常工作在顛簸振動的狀態,接插件容易松動造成HALL信號輸入的失效,程序設計時需要充分考慮異常情況的處理。圖4是電動自行車基本的控制框圖。可以看出,電動自行車的BLDC是一個速度開環控制系統:PWM控制器的占空比是由多個輸入因素決定的,這些因素主要包括轉把輸入電壓,直流總線電流大小,電池電壓,剎車信號以及一些保護信號。電機的轉速和負載是直接相關的,當負載加大時,用戶必須通過加大轉把輸入電壓來提高PWM輸出的占空比,從而增加電機輸出轉矩以維持相應的速度。
電子輔助剎車
目前市場上常見的電動車,剎車是以機械為主,輔以電子制動。電子輔助剎車可有效縮短剎車的距離,并且在機械剎車失效的時候仍然可保證有效的剎車,從而提高車輛的安全性。另外,電子輔助剎車可延長機械剎車器的使用壽命。

根據BLDC電機的工作原理可以知道,通過改變線圈電流方向就可實現BLDC電機轉矩方向發生改變。因此,如果在電機線圈上施加與正常旋轉時候的電流方向相反的電流就可產生電子剎車所需要的轉矩。目前電子剎車方法主要有五種,在實際軟件設計中,需要根據實際情況結合使用。表1是五種常見的電子輔助剎車控制方法及其特點。

霍爾傳感器相關文章:霍爾傳感器工作原理
霍爾傳感器相關文章:霍爾傳感器原理


評論