實時操作系統μC/OS-II的改進與應用研究

傳統的嵌入式系統設計大多采用單任務順序機制,應用程序是一個無限的大循環,所有的事件都按順序執行,與時間相關性較強的事件靠定時中斷來保證,由此帶來系統的穩定性、實時性較差;尤其當系統功能較復雜,且對實時性要求較嚴格時,這種單任務機制的弱點暴露無遺。本文引入的嵌入式操作系統μC/OS-II是一個多任務的實時內核,主要提供任務管理功能。在實時系統中的多個任務,必須決定這些任務的優先級順序,任務調度算法需要動態為就緒任務的優先級排序。為了滿足對實時性要求越來越高的需要,同時避免頻繁改變就緒任務的優先級,在分析μC/OS-II源代碼的基礎上,對其調度算法進行改進。
本文引用地址:http://www.j9360.com/article/78799.htm1 μC/OS-II概述
μC/OS-II是一個完整的,可移植、可固化、可裁剪的占先式實時多任務內核;支持56個用戶任務,支持信號量、郵箱、消息隊列等常用的進程間通信機制;適用于各種微控制器和微處理器;所有代碼用ANSI C語言編寫,程序的可讀性強,具有良好的可移植性,已被移植到多種處理器架構中,在某些實時性要求嚴格的領域中得到廣泛應用。
1.1 工作原理
μC/OS-II的核心工作原理是:近似地讓最高優先級的就緒任務處于運行狀態。首先初始化MCU,再進行操作系統初始化,主要完成任務控制塊TCB初始化,TCB優先級表初始化,TCB鏈表初始化,事件控制塊(ECB)鏈表初始化,空任務的創建等。然后,開始創建新任務,并可在新創建的任務中再創建其他新任務。最后,訶用OSStart()函數啟動多任務調度。在多任務調度開始后,啟動時鐘節拍源開始計時,此節拍源給系統提供周期性的時鐘中斷信號,實現延時和超時確認。
1.2 任務調度
操作系統在下面的情況下進行任務調度:中斷(系統占用的時間片中斷OSTimeTick()、用戶使用的中斷)和調用API函數(用戶主動調用)。一種是當時鐘中斷來臨時,系統把當前正在執行的任務掛起,保護現場,進行中斷處理,判斷有無任務延時到期;若沒有別的任務進入就緒態,則恢復現場繼續執行原任務。另一種調度方式是任務級的調度,即調用API函數(由用戶主動調用),足通過發軟中斷命令或依靠處理器在任務執行中調度。當沒有任何任務進入就緒態時,就去執行空任務。
2 調度算法的改進
2.1 實時系統的調度策略
在操作系統的多任務調度算法的設計上,要根據系統的具體需求來確定調度策略。實時調度策略按不同的方法可以分為:靜態/動態,基于優先級/不基于優先級,搶占式/非搶占式,單處理器/多處理器。其中,靜態是指在任務的整個生命期內優先級保持不變,任務的優先級是在系統建立任務時確定的;動態是指在任務的生命期內,隨時確定或改變它的優先級別,以適應系統工作環境和條件的變化。
μC/OS-II系統采用的是靜態優先級分配策略,由用戶來為每個任務指定優先級。雖然任務的優先級可通過OSTaskChangePrio()函數改變,但函數功能簡單,僅以用戶指定的新優先級來替換任務當前的優先級。隨著實時嵌入式技術的發展,對嵌入式系統的實時性要求越來越高,多樣化的調度方法己成為一種趨勢。本文討論動態優先級調度中的最優算法截止期最早優先算法的改進及其在μC/OS-II中的實現。
2.2 調度算法的改進
截止期最早優先算法是動態優先級調度算法中的最優算法。在截止期最早優先算法中,系統按任務的截止期給每個任務分配優先級。任務的截止期越早其優先級越高,反之亦然。為此,在本文所述截止期最早優先算法的改進中.需在μC/OS-II系統中增加表l所列的項目。
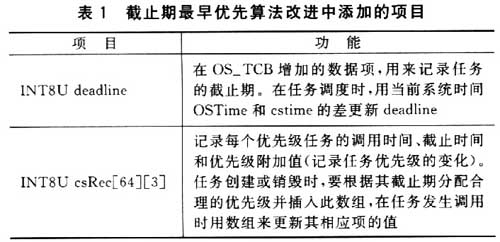
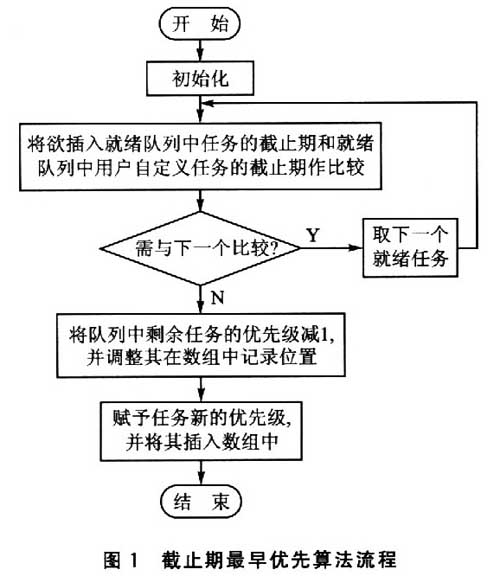
在截止期最早優先算法中,需要用戶為任務指定其截止期。在本改進中,將OSTaskCreate()和OSTaskCreateExt()中的參數INT8U Prio改為INT8U deadline,并在函數內定義局部變量INT8U Prio來記錄分配給任務的優先級。該算法改進也要在系統中增加OSTaskPrioCreate()函數,函數優先級分配的方法是按任務的截止期分配。該模塊流程如圖l所示。
在對就緒任務優先級進行調整時,該模塊首先在數組中對任務的優先級完成調整并記錄任務優先級的調整情況。在執行此函數后,就緒任務隊列中任務的優先級可能會改變,園此還需要在μC/OS-II系統中添加prio_adjust()函數。該函數應用μC/OS-II系統原有的函數OSTaskChangePrio()來更新就緒任務,代碼如下:
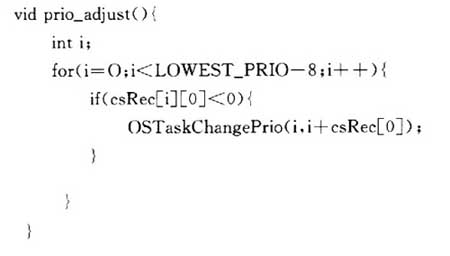
為防止多個任務同時調用OSTaskPrioCreate()函數造成混亂,這段代碼應按臨界資源來處理,需要在調用前關中斷,調用后再開中斷。
3 應用及評價
3.1 系統結構
在液壓測量控制HPMC模塊中,系統要求在18ms內完成對7個位置的傳感器和用戶鍵盤數據的實時采集、處理及顯示;且對于采集到的不同測量數據,要求系統根據任務的緊迫程度,作出優先級不同的實時響應。
系統的結構如圖2所示。由外向內分為3層:硬件電路層、任務層和操作系統層。
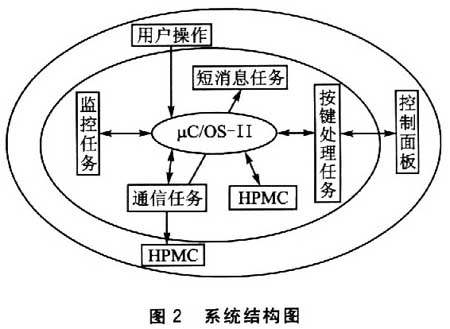
硬件電路層主要包括HPMC模塊、用戶操作、單片機控制模塊。大致功能如下:HPMC模塊主要完成傳感器數據的實時采集;用戶模塊主要完成用戶的操作;單片機控制模塊用于控制數據的接收、處理、發送、短消息的收發等。
任務層并行存在lO個任務,每個任務均由以下3部分組成:應用程序、任務堆棧以及任務控制塊,主要完成任務優先權的動態設置以及任務狀態的轉換。
操作系統層的設計主要是將μC/OS-II移植到單片機上。本系統采用Atmel公司的MCS-5l系列兼容單片機,同時完成各個任務的具體編程。
3.2 算法評估
選擇用動態調度還是靜態調度是很重要的,這會對系統產生深遠的影響。靜態調度對時間觸發系統的設計很適合,而動態調度對事件觸發系統的設計很適合。靜態調度必須事先仔細設計,并要花很大的力氣考慮選擇各種各樣的參數;動態調度不要求事先作多少工作,而是在執行期間動態地作出決定。
在HPMC模塊中,由于需對現場采集到的測量數據進行實時處理,故對系統的實時性提出了很高的要求。若采用μC/OS-II的靜態優先級調度算法,當系統中任務優先級變化時則顯得無能為力;同時通過在液壓測量控制系統中的應用表明,改進后系統的實時性得到了極大改善。
結語
本文針對μC/OS-II靜態調度算法進行改進,在系統中實現了截止期優先調度算法。通過在液壓測量控制系統中的應用,表明這種改進能明顯提高系統的實時性;但是改進后的算法對系統的內存、CPU等提出了更高的要求,存在一定的局限性。
linux操作系統文章專題:linux操作系統詳解(linux不再難懂)






評論