基于京微雅格CME-M7的智能機器人控制系統設計與實現

1 前言
本文引用地址:http://www.j9360.com/article/268457.htm新的科技與技術已經讓現階段工業機器人實現高精確度的水平。機器人的應用越來越廣泛,需求越來越大,其技術研究與發展越來越深入,這將提高工業生產率與產品質量,為社會創造巨大的財富。工業機器人的發展歷史工業機器人誕生于 20 世紀 60 年代, 20 世紀 90 年代得到迅速發展,現階段最先進產業化的機器人是綜合了計算機、控制論、機構學、信息和傳感技術、人工智能、仿生學等多學科而形成的高新技術,是當代研究十分活躍,應用日益廣泛的技術領域。它是為了適應制造業規模化生產,解決單調、重復的體力勞動和提高生產質量而代替人工作業而產生的。在我國工業機器人發展從初步使用階段到目前自主開發階段的轉變,促進了我國制造業,勘探業等行業的發展。故工業機器人技術發展極為蓬勃與積極。
工業機器人是由操作機(機械本體) 、控制器、伺服驅動系統和檢測傳感裝置構成;是一種仿人操作、自動控制、可重復編程、能在三維空間完成各種作業的機電一體化自動化生產設備。
京微雅格首創研發并已開始產業化的集FPGA/CPU/SRAM/ASIC/ADC/Flash為一體的“可定制可重構可編程”多功能高性能低成本可配置應用平臺(CAP),在經濟建設的各個領域具有廣泛的應用,被譽為多種行業的“萬能芯片”,完全符合工業機器人行業新的發展趨勢。
又當CME 所獨創的可配制應用平臺(CAP)來成為控制核心,可提供工業機器人等這類需要多品種,變化大,又批量的可重復編程應用領域需求。
CAP架構于此平臺上后可使工業機器人技術可實現于計算機、控制論、機構學、信息和傳感技術、人工智能、仿生學等多學科而形成的高新技術運算控制。可應對環境狀態的快速反應和分析判斷能力,又可使機器持續工作、高精確度、強化抗惡劣環境的能力,從而達到上述要求的優點。
機器人技術是融合了許多學科的知識,國內已廣泛把機器人制作比賽作為創新教育的戰略性手段。”大學生機器人大賽”、“機器人相撲大會”、“機器人足球賽”等各種類型的機器人制作比賽,培養學生的動手能力、創造能力、合作能力和進取精神,同時也普及智能機器人的知識。提升學生的開發技能水平,亦不乏眾多科技界人士參與學習與研究開發。
基于CME的可配制應用平臺(CAP)設計的機器人,實現了機器人的基本動作、路徑跟蹤、自動糾偏、拍攝影像、分析對象、探測環境、實時顯示距離等高階功能。
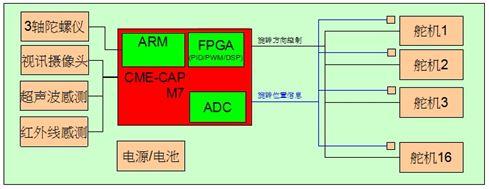
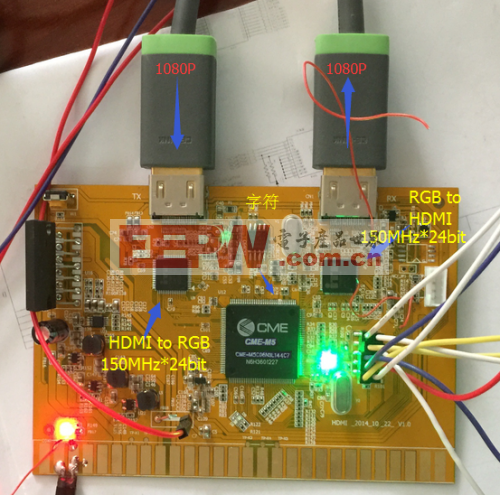
CME-M7可配制應用平臺(CAP)是一款集成了更高級MCU內核和高性能FPGA的智能型芯片,通過將FPGA、CPU、SRAM、ASIC、Flash、ADC、LVDS、高速PHY以及模擬單元等功能模塊集成在單一芯片上,CME-M7能夠滿足不同應用場合的“可定制可重構可編程”設計需求,實現了FPGA的SoC化。
CME-M7的FPGA部分采用高達12K容量的新型LP (Logic Parcel,邏輯包)結構,優化了FPGA與高級MCU內核的通信接口,客戶可根據設計需求在FPGA上實現不同類型接口。同時,CME-M7的高級MCU內核結構基于FPGA應用也進行了優化,數據與程序空間均動態可調。
利用FPGA和CPU可定制可編程可擦寫可重構的優勢,實現一款核心產品同時滿足不同行業應用,同類產品之間的差異化設計以提高競爭優勢。




評論